
WMG News
Autonomous vehicle safety standard concept enables tests needed to be road ready
- Operation Design Domain (ODD) is a fundamental to Connected autonomous Vehicle (CAV) safety, as it describes specific operating conditions in which the CAV system can operate safely, including environmental parameters such as weather an infrastructure
- Defining an ODD in a standard way has now been made official thanks to a new international standard concept created the German standards body ASAM and led by WMG at the University of Warwick, which defines the language used to define an ODD
- The new ASAM OpenODD language concept clears the barrier between CAV manufacturers and authorities, so they can find out if the vehicle is allowed to drive within the authority’s area or not and vice versa
An Operational Design Domain (ODD) is fundamental to Connected Autonomous Vehicle safety, however defining an ODD hasn’t been done before, until now, thanks to the work undertaken by German standardisation body ASAM and led researchers from WMG, University of Warwick.
An Operational Design Domain Definition (ODD) describes specific operating conditions in which the automated driving system is designed to properly operate. It specifies what operating parameters the CAV must be able to manage, for example, weather conditions, infrastructure, location, time of day and everything else that can have an impact on the driving situation. The ODD is thus an important part of the safety concept of a vehicle and must be valid throughout its entire service life for a particular configuration of the CAV.
ASAM, a German standardisation body have been working with WMG, University of Warwick and other international experts to publish a new international standard concept, to develop a language for defining ODDs. They have successfully created a concept for machine-interpretable format to represent the ODD specification. The concept paper can be downloaded free of charge. Additional use cases or requirements can still be proposed before the standard development starts.
Th new format concept enables governments and the automotive industry to access ODD descriptions that are exchangeable, comparable, and processable.
An application example of the effective use of ASAM OpenODD is as follows: A city describes the ODD for its downtown area in the ASAM OpenODD format and makes it available to automotive manufacturers. The manufacturers can then use these descriptions to easily match their vehicles with the defined ODD to find out if their vehicles are allowed to drive in the respective downtown area. They can also use the descriptions to map their scenario test catalogue to the requirements of the ODD. The registration authorities have the benefit of defining ODDs that they can use to check autonomous vehicles. They can also be used to support the development of the ADAS and AD systems, as the use of the ODD can define the testcases that are necessary to validate the vehicle. There can be obvious limitations, for example, if the vehicle is not capable of speeds above 50 km/h highway tests are not necessary. This application of an ODD helps to focus the limited validation resources on the really needed scenarios.
Dr Siddartha Khastgir, from WMG, University of Warwick and project lead for ASAM Open ODD Concept project comments: “Operational Design Domain definition is key to creating a safe automated vehicle. However, how is an ODD defined hasn’t been officially deemed, until now, as the ASAM OpenODD concept has provided the language to define an ODD.
definition is key to creating a safe automated vehicle. However, how is an ODD defined hasn’t been officially deemed, until now, as the ASAM OpenODD concept has provided the language to define an ODD.
“This means that going forward CAV manufacturers can define and exchange ODD definitions and authorities can have a common understanding of the ODD definition. I am grateful to all international experts who have contributed to this work. Achieving safety of automated driving needs to be a collaborative effort and ASAM OpenODD is an example of this.”
Peter Voss, Managing Director, ASAM E.V. comments:
"ASAM OpenODD will be a standard that will not only contribute to the safety of automated vehicles, but more importantly, will help to implement automated driving functions faster,".
In addition to the format and syntax, the concept for ASAM OpenODD also takes into account attributes (leveraging ISO 34503), metrics and the representation of uncertainties. The future standard will be compatible with all other standards of the ASAM OpenX family, particularly with OpenDRIVE, OpenSCENARIO and OpenXOntology.
ENDS
1 FEBRUARY 2022
NOTES TO EDITORS
High-res images available at:
https://warwick.ac.uk/services/communications/medialibrary/images/april2020/sid_39.jpg
{kind=link}
Caption: Dr Siddartha Khastgir, from WMG, University of Warwick
Credit: WMG, University of Warwick
ASAM OpenODD Concept: https://www.asam.net/standards/detail/openodd/
Recording of webinar: https://www.asam.net/conferences-events/detail/webinar-asam-openodd-concept/
Further resources on understanding ODDs:
What is an ODD (by Nicco Hagedorn, ASAM e.V.): https://www.youtube.com/watch?v=u4F5OZlRlaQ
Curious case blog (by Siddartha Khastgir, WMG): https://bit.ly/CuriousCaseODD
For further information please contact:
Alice Scott
Media Relations Manager – Science
University of Warwick
Tel: +44 (0) 7920 531 221
E-mail: alice.j.scott@warwick.ac.uk
WMG academic joins Department for Transport’s Science Advisory Council
· Dr Siddartha Khastgir, from WMG at the University of Warwick has been appointed to be on the Department for Transport’s Science Advisory Council (SAC).
· The DfT Science Advisory Council (SAC) provides independent strategic advice and challenge to the Department on key areas of science, social science engineering and technology.
· Dr Khastgir will focus on taking a systems thinking approach across various modes of transport (land, air and marine) to ensure their safe enrolment and public acceptance in the UK
Dr Siddartha Khastgir from WMG, University of Warwick, has been appointed to be on the DfT’s Science Advisory Council, where he will advise on a wide range of science and engineering issues, such as enrolment of Autonomous Vehicles.
Today, Friday 14th January 2022, the Department for Transport have announced five new members and a new Chair joining their Science Advisory Council, including Dr Siddartha Khastgir from WMG, University of Warwick.
The DfT’s Science Advisory Council provide the DfT with advice and challenge on key areas of science, engineering and technology, supporting the role for the DfT Chief Scientific Adviser Professor Sarah Sharples, by ensuring departmental activity is informed by the best external expertise and evidence, identifying relevant emerging issues and trends and assuring DfT’s use of science and technology.
Dr Siddartha Khastgir is Head of Verification and Validation of Connected and Autonomous Vehicles at WMG, University of Warwick. In 2019 he was awarded a UKRI Future Leader Fellowship focusing on Autonomous Vehicle safety standards. Leveraging his research on Autonomous Vehicles safety, he will focus on taking a cross-domain approach to safety in land, marine and air.
With his new appointment on the council Dr Khastgir will help advise DfT on the technological and societal challenges surrounding introduction of new technologies, and how they can be enrolled in UK safely and efficiently. He comments:
“To be a part of the Department for Transport’s Science Advisory Council is incredibly exciting, I’m looking forward to working with other experts in the field to provide advice to help the DfT to inform future policy, with its foundations in strong research outputs. Not only do we need to create safe systems, we need to communicate with the public to ensure public acceptance.”
Margot James, Executive Chair at WMG, University of Warwick adds “I am delighted to hear that Siddartha has been appointed to the Department for Transport Science Advisory Council, a reflection of his world-leading research into safety for connected and autonomous vehicles. I will be watching with interest to see how the DfT moves this emerging technology forward, and look forward to Siddartha being a key part of this.”
UKRI Future Leaders Fellowships Director Stephen Meader said:
“The world leading research undertaken by Dr Khastgir and his team is vital for the development of safe autonomous vehicles that can cut both congestion and carbon emissions.
“Dr Khasgir’s appointment to the Department for Transport’s Science Advisory Council (SAC) demonstrates both the importance of this work to the future of mobility in the UK and the value the Future Leaders Fellowships scheme brings in enabling his research.”
Other new appointees joining six existing members include:
· Dr Siddartha Khastgir, Head of Verification and Validation of Connected and Autonomous Vehicles, University of Warwick
· (SAC Chair) Professor Alastair Lewis, Professor of Atmospheric Chemistry, University of York
· James Gaade, Head of Programme Management, The Faraday Institution
· Professor William Powrie, Professor of Geotechnical Engineering, University of Southampton
· Dr Emma Taylor, Head of Digital Safety, RazorSecure Ltd.
· Professor Patricia Thornley, Director of the Energy & Bioproducts Research Institute, Aston University
Department for Transport Chief Scientific Adviser, Sarah Sharples, said: “I’m pleased to welcome the new members appointed to the Science Advisory Council. They bring significant additional expertise in key areas that will support DfT’s effective use of science and engineering. I look forward to working with them.”
ENDS
14TH JANUARY 2022
NOTES TO EDITORS
High-res images available at: https://warwick.ac.uk/services/communications/medialibrary/images/april2020/sid_39.jpg
Caption: Dr Siddartha Khastgir, from WMG, University of Warwick
Credit: WMG, University of Warwick
For further information please contact:
Alice Scott
Media Relations Manager – Science
University of Warwick
Tel: +44 (0) 7920 531 221
E-mail: alice.j.scott@warwick.ac.uk
Joint European effort boosts automated driving
- L3Pilot, Europe’s first comprehensive pilot test of automated driving on public roads demonstrates automated systems for cars in Hamburg, Germany, in conjunction with ITS World Congress 2021
- SAE Level 3 and 4 automated driving systems have been tested on ordinary roads in seven European countries, including cross-border activities, thanks to pan-European testing environments and methodologies that have been developed with help from WMG, University of Warwick
- A “Code of Practice” has been created to speed up and harmonise the development of automated driving systems as well as a framework for collection, storage and evaluation of large amounts of data
- Increased safety identified as main benefit of SAE Level 3 automated driving systems
From 11 to 15 October the European research project L3Pilot, which WMG at the University of WarwickLink opens in a new window has worked on, led by Volkswagen AG and co-funded by the European Commission, showcases automated driving functions in the City of Hamburg and on motorways nearby. The four-year project will now come to its successful end with performing its Final Event in conjunction with the ITS World Congress in Hamburg 2021.
 Running from 2017 to 2021, the project consortium brought together stakeholders from the whole value chain, including car manufacturers, suppliers, academia, research institutes, infrastructure and governmental agencies, user groups and the insurance sector.
Running from 2017 to 2021, the project consortium brought together stakeholders from the whole value chain, including car manufacturers, suppliers, academia, research institutes, infrastructure and governmental agencies, user groups and the insurance sector.
The experience of the partners in large-scale testing intelligent vehicle technologies made it possible to create a pan-European testing environment. The Code of Practice for the Development of Automated Driving Functions (CoP-ADF) is one of the major achievements of L3Pilot. It provides comprehensive guidelines for supporting the design, development, verification and validation of automated driving technologies.
Fourteen partners focused on testing automated driving functions in normal motorway driving, traffic jams, urban driving and parking. The pilots, running from April 2019 until February 2021, involved seven countries: Belgium, Germany, France, Italy, Luxemburg, Sweden and the United Kingdom and included two cross-border activities between Germany and Luxemburg as well as Germany, Belgium and the United Kingdom.
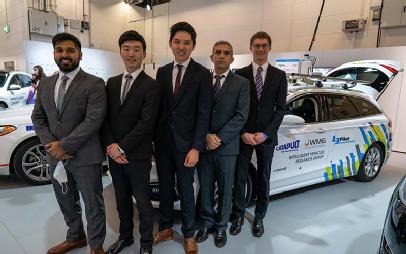
WMG, at the University of Warwick focussed on the development of a proof-of-concept prototype and a real-world demonstration of a cutting-edge technology for cooperative perception, using WMG’s state-of-the-art Open Innovation Vehicle Platform and mobile roadside units.
Aiming to enable safe automated driving at complex driving scenarios, such as roundabouts and T-junctions, the equipment was funded by the WMG Centre High Value Manufacturing (HVM) Catapult.Link opens in a new window Specialising in innovation aimed at making transport cleaner, safer and more efficient, the CentreLink opens in a new window works with UK manufacturing partners to develop automated, connected, electric and shared mobility for a sustainable future.
However WMG also contributed to a variety of key project activities including: Cyber Security Analysis of highly automated driving functions in highway environments, known as highway chauffeur, and the development of a Consolidated Database (CDB) to store large datasets acquired in the project during the experimental phase, which also included designing and implementing a web-based User Interface (UI) to provide access to CDB for L3pilot users, for example, partners and data analysts.
Prof. Mehrdad Dianati, from WMG at the University of Warwick comments:
“A major challenge for the safety of automated vehicles is how they will navigate through complex road segments, a part of our role in L3Pilot was to demonstrate how this challenge can be addressed using state-of-the-art cooperative automated driving technology we have developed at WMG.
L3Pilot Coordinator Aria Etemad, Volkswagen AG comments:
“Automated driving has a huge potential to make mobility safer, more efficient and more comfortable. The L3Pilot partners made great efforts to pursue piloting and met the project goals – despite the tremendous pandemic crisis. This shows the outstanding commitment of our Europe-wide partner network. One of our major achievements is a Code of Practice for the Development of Automated Driving Functions. It provides guidelines that will support the development of safe and reliable automated driving systems.”
 The project equipped 70 vehicles and the test fleet comprised 13 different vehicle brands, from a passenger car to a SUV. More than 400,000 kilometres were driven on motorways including 200,000 km in an automated mode and 200,000 km in a manual mode as a baseline for comparison of the user experience and evaluation of the impacts. More than 24,000 km were travelled in the automated mode in urban traffic. With the aim to put the focus on the user experience of automated driving functions, over 1,000 persons participated in piloting and complementary virtual environment tests.
The project equipped 70 vehicles and the test fleet comprised 13 different vehicle brands, from a passenger car to a SUV. More than 400,000 kilometres were driven on motorways including 200,000 km in an automated mode and 200,000 km in a manual mode as a baseline for comparison of the user experience and evaluation of the impacts. More than 24,000 km were travelled in the automated mode in urban traffic. With the aim to put the focus on the user experience of automated driving functions, over 1,000 persons participated in piloting and complementary virtual environment tests.
The project focused on SAE Level 3 automated driving functions on motorways and in urban traffic, while SAE Level 4 functions targeted exclusively parking and close-distance scenarios. The SAE Level 3 features Conditional Automation which requires the driver to respond appropriately to a request to take-over the vehicle control for manual driving. In case the driver is not responding properly to a take-over request, the vehicle performs an automatic minimum risk manoeuvre to safely stop the vehicle.
Moreover, L3Pilot carried out extensive supplementary tests to also research user experiences that were difficult to address in large-scale piloting due to safety requirements and legal issues. Therefore, supplementary studies were performed in addition to the on-road piloting to be able to study system usage and other relevant user experiences with ordinary, non-professional drivers in safe and virtual environments. The extensive studies comprised some 600 subjects.
Research evaluation results have shown that increased safety is the main benefit of SAE Level 3 automated driving systems. They also show that an automated driving system consisting of motorway, urban and parking functions for robust hands-off driving will generate a social benefit that is higher than the social costs of installing it.
L3Pilot paved the way for scaled-up driving tests with automated series vehicles in real-life traffic. This underscores the leadership of Europe's automotive industry in developing reliable, thoroughly tested and user-friendly technology.
ENDS
12 OCTOBER 2021
NOTES TO EDITORS
High-res images available at:
https://warwick.ac.uk/services/communications/medialibrary/images/september_2021/microsoftteams-image_5.png
Caption: WMG, at the University of Warwick demonstrating their technical achievement at ITS World Congress.
Credit: WMG, University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/september_2021/microsoftteams-image_7.png
Caption: WMG, at the University of Warwick demonstrating their technical achievement at ITS World Congress.
Credit: WMG, University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/september_2021/microsoftteams-image_8.png
Caption: WMG, at the University of Warwick demonstrating their technical achievement at ITS World Congress.
Credit: WMG, University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/september_2021/microsoftteams-image_9.png
Caption: WMG, at the University of Warwick demonstrating their technical achievement at ITS World Congress.
Credit: WMG, University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/september_2021/microsoftteams-image_10.png
Caption: WMG, at the University of Warwick demonstrating their technical achievement at ITS World Congress.
Credit: WMG, University of Warwick
{kind=link}
Video available to view at:
https://www.youtube.com/watch?v=eJnzMGcr9Fc
Credit: WMG, University of Warwick
L3Pilot is an Innovation Action, co-funded by the European Union under the Horizon 2020 programme with the contract number 723051. Thirty four organisations have committed to scientifically test and assess the impact of automated driving systems on driver comfort, safety and traffic efficiency as part of the project.
www.l3pilot.eu
Twitter _L3Pilot_
LinkedIn: L3Pilot
Duration: 50 months, 1 September 2017 – 31 October 2021
Total cost: €68 million
EC contribution: €36 million
Coordinator: Volkswagen AG
Partners:
Automotive manufacturers: Volkswagen AG, AUDI AG, BMW Group, Stellantis | Centro Ricerche Fiat SCPA, Ford, Honda R&D Europe, Jaguar Land Rover, Mercedes-Benz AG, Adam Opel AG, Stellantis, Renault, Toyota Motor Europe, Volvo Car Corporation
Suppliers: Aptiv, FEV GmbH, Veoneer Sweden
Research: German Aerospace Center DLR; ika RWTH Aachen University; VTT Technical Research Centre of Finland; Chalmers tekniska hoegskola; SNF – Centre for Applied Research at NHH; University of Leeds; Institute of Communication and Computer Systems ICCS; Würzburg Institute for Traffic Sciences WIVW; University of Genoa; TNO – Netherlands Organisation for Applied Scientific Research; WMG, University of Warwick; European Center for Information and Communication Technologies – EICT GmbH
Authorities: Federal Highway Research Institute BASt; The Netherlands Vehicle Authority RDW
User Groups: Federation Internationale de l’Automobile FIA
Insurers: AZT Automotive GmbH, Swiss Reinsurance Company
SMEs: ADAS Management Consulting,
For further information please contact:
Alice Scott
Media Relations Manager – Science
University of Warwick
Tel: +44 (0) 7920 531 221
E-mail: alice.j.scott@warwick.ac.uk
First International safety standard for fully automated driving systems has been published
§ One of the first applications of Level 4 autonomous vehicles is expected to be low speed automated driving (LSAD) systems, such as pods
§ However, lack of safety standards has hampered their commercial deployment on public roads
§ An international group of experts led by WMG, University of Warwick working together as a part of an ISO technical committee, has published the first international (ISO) safety standard for level 4 automated driving systems, taking them a step further towards being more widely available
· This new ISO standard could enable an environmentally-friendly transport option, as well as a solution for people with mobility issues.
The use of low speed automated driving systems can contribute to reduction of congestion and carbon emissions all over the world, however the enrolment of such systems has been hampered by the lack of safety standards, until now; as an international group of experts led by WMG, University of Warwick working as part of an ISO technical committee have published the first international safety standard for level 4 automated driving systems.
Low speed automated driving (LSAD) systems, such as the autonomous pods are classed as a level 4 automated driving systems. They provide an opportunity for cities to reduce congestion and carbon emissions, thus contributing to net-zero targets.
opportunity for cities to reduce congestion and carbon emissions, thus contributing to net-zero targets.
They currently tend to operate on predefined routes in low-speed environments, often being used in commercial, business or university campuses. Yet growth in this area has been hampered by a lack of international standards that define minimum performance and safety requirements to be met.
However, the first international safety standard for a level 4 automated driving systems has just been published by ISO (International Organization for Standardization) to help accelerate its progress in a safe and sustainable way.
The standard, ISO 22737, ‘Intelligent transport systems — Low-speed automated driving (LSAD) systems for predefined routes — Performance requirements, system requirements and performance test procedures’ was developed by an international group of experts led by Dr Siddartha Khastgir from WMG, University of Warwick, UK.
In the ISO 22737 standard, the group have set out the specific minimum safety and performance requirements for LSAD systems, providing a common language to help facilitate the development and safe deployment of this technology worldwide. The group included experts from Japan, USA, Canada, Australia, South Korea, China, Germany, France, the Netherlands, Hungary and the UK.
This standardization activity is underpinned by strong research outcomes from the CCAV and Innovate UK funded INTACT research project by WMG and Aurrigo; and also by the research conducted as part of Dr Khastgir’s UKRI Future Leaders Fellowship.
Dr Siddartha Khastgir, from WMG, University of Warwick who served as the Project Leader of the group of experts that developed the ISO standard, stated that:
that:
“An increased use in LSAD systems can lead to a shift in the way people, goods and services are transported. This new standard will enable the safe deployment of an environmentally-friendly transport option, as well as a solution for people with mobility issues."
Some of the key points from the new standard include:
· Providing minimum operating capabilities for LSAD systems including guidance on Operational Design Domain (ODD) definition· Guidance on how LSAD systems may fit into the wider transport ecosystem
· Performance requirements for different aspects of the LSAD system such Dynamic Driving Task; Emergency maneuvers (e.g. emergency stop and minimal risk maneuvers); hazardous situation identification; static and dynamic obstacle detection and avoidance
· Test procedures for various system functionalities
Simon Brewerton, Chief Technology Officer at Aurrigo Driverless Technology, a Coventry based LSAD system manufacturer comments:
“Aurrigo is one of only a couple of UK based vehicle OEMs who produce low speed autonomous vehicles. These vehicles are engineered in the UK but are deployed globally. It had been increasing difficult to communicate the level of safety engineering that our vehicles encompass, and also difficult to compare various attributes and functionality against the perceived state of the art for this class of vehicle.
“Aurrigo decided to invest our resources and domain knowledge following an invitation from WMG to bring an OEM viewpoint to the BSI working group for the ISO22737 LSAD standard. Working closely with Siddartha, Aurrigo had the opportunity to share the experiences gained from many deployments globally, and provide insight into the practicalities of building a suitable test regime.
 “The new LSAD standard puts a line in the sand for all OEMs to exceed and so enables a global market where all players rise to the same exacting standards as each other, keeping the public safe and the industry competitive.”
“The new LSAD standard puts a line in the sand for all OEMs to exceed and so enables a global market where all players rise to the same exacting standards as each other, keeping the public safe and the industry competitive.”
Nick Fleming, Head of Sector, Transport and Mobility, British Standards Institution mentioned:“BSI, the UK’s National Standards Body, would like to recognise the work of our technical committee (EPL/278) and UK experts that have fed into the development of this important standard, the first international (ISO) standard for Low-Speed Autonomous Driving (LSAD) systems. BS ISO 22737 is an important development in the evolving landscape for automated vehicle standards, much like BSI’s PAS 1883 an ODD (Operational Design Domain) taxonomy for Automated Driving Systems authored by Siddartha and published in 2020, in helping support safe trialing and operation of automated vehicles.”
UKRI Future Leaders Fellowships Director Stephen Meader said:
“The publication of the first International safety standard for fully autonomous vehicles represents a major step towards the widespread adoption of a more environmentally friendly mode of transport that can cut both congestion and carbon emissions. In the year of COP26, this kind of innovation has never been more important.
“The work of Dr Khastgir and his team demonstrates the value of Future Leaders Fellowships funding to support talented researchers and innovators to deliver change that can be felt across society and the economy.”
ISO 22737 was developed by ISO technical committee ISO/TC 204 Intelligent transport systems, whose secretariat is held by ANSI, the ISO member for the USA.
It can be purchased from your national ISO member or through the ISO Store.
ENDS
8 JULY 2021
NOTES TO EDITORS
Dr Siddartha Khastgir is the recipient £1.2 million UKRI Future Leader Fellow which focusses on evaluating the safety of Autonomous Vehicles by scenario generation and use of simulation-based testing. See more: https://warwick.ac.uk/fac/sci/wmg/research/cav/vandv/ukriflf/
High-res images available at:
https://warwick.ac.uk/services/communications/medialibrary/images/july_2021/img_0022_-2.jpeg
Caption: Some members of the drafting team of ISO 22737. Experts from Japan, USA, South Korea, Canada, Australia and the UK
Credit: WMG, University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/january2020/xt2a0019.jpg
Caption: Aurrigo Autonomous pods outside the Professor Lord Bhattacharyya building, University of Warwick
Credit: WMG, University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/july_2021/1.jpg
Caption: Aurrigo Autonomous pod on a pedestrian street
Credit: Aurrigo Driverless Technology
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/july_2021/2.jpg
Caption: Aurrigo Autonomous pod on a pedestrian street
Credit: WMG, University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/july_2021/7.jpg
Caption: Aurrigo Autonomous pod on a pedestrian street
Credit: Aurrigo Driverless Technology
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/july_2021/3.jpg
Caption: Aurrigo Autonomous pod
Credit: Aurrigo Driverless Technology
{kind=link}
ISO 22737: https://www.iso.org/standard/73767.html
For further information please contact:
Alice Scott
Media Relations Manager – Science
University of Warwick
Tel: +44 (0) 7920 531 221
E-mail: alice.j.scott@warwick.ac.uk
Increasing shared E-scooter service life from 3 months to 3 years
- Rental e-scooters are a rising trend in cities across the world, although they do not produce CO2 when used, their typical service life is 2-5 months, after which they are scrapped
- Scrapping of scooters has a huge environmental impact, which will only get worse over time
- To decrease the number of scooters being scrapped researchers from WMG, University of Warwick, want to increase their lifespan from three months to three years, making them more eco-friendly
The current lifespan of a rental e-scooter is on average three months, after which they are scrapped, which isn’t environmentally friendly despite the scooters not producing any CO2 when in use. Researchers from WMG, University of Warwick, aim to increase their lifespan from three months to three years, making them more eco-friendly.
Shared, or rental e-scooters are quickly becoming a popular mode of transport across the world, being trialled in numerous cities across the UK. Their usage has accelerated rapidly since 2020 in response to COVID-19, as people seek alternative options from public transport.
With the rise in number of e-scooters deployed, there has been an increased focus of their environmental impact. Although e-scooters do not produce any CO2 at the point of use, which can help to promote cleaner air in the places they are deployed, the typical service life is only 2-5 months, after which point they are scrapped. This has a huge environmental impact, which is only going to get worse over time.
Thanks to funding from WMG centre High Value Manufacturing Catapult, over the next two years researchers from WMG, University of Warwick will seek to increase e-scooter service life from three months to three years, through innovative human factors engineering processes in collaboration with leading e-scooter companies.
The researchers are taking a deployment view of rental e-scooters, considering not only the e-scooter vehicle, but every aspect of the service design. This includes analysis of the environment e-scooters operate in and how both riders and non-riders engage with the service.
Dr Roger Woodman, from WMG, University of Warwick explains:
“Thanks to funding from WMG centre High Value Manufacturing Catapult, we are able to take a human factors approach to look at how e-scooters are constructed and operated, to find areas for improvement in both the service and vehicle design, to increase their usable lifespan and make them more eco-friendly.”
“This massive increase of the average service life has the potential to greatly reduce environmental impact and make e-scooters a truly sustainable form of transport.”
The project has also bought more opportunities for students, as there is a PhD opportunity within the team focussing on micromobility transport modelling.
ENDS
19 MAY 2021
NOTES TO EDITORS
High-res images available at:
https://warwick.ac.uk/services/communications/medialibrary/images/april_2021/launch_pic_1_-_uow_-_voi_edited.jpg
Caption: An e-scooter on campus
Credit: University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/april_2021/wmg_midlands_future_mobility_2021_21.jpg
Caption: An e-scooter on campus with an autonomous pod
Credit: WMG, University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/april_2021/wmg_midlands_future_mobility_2021_23.jpg
Caption: An e-scooter on campus with an autonomous pod
Credit: WMG, University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/april_2021/wmg_midlands_future_mobility_2021_16.jpg
Caption: An e-scooter on campus with an autonomous pod
Credit: WMG, University of Warwick
{kind=link}
For more information on Micromobility research at WMG visit: https://warwick.ac.uk/fac/sci/wmg/research/cav/humanfactors/projects/micromobility
To find out more about the PhD visit: https://warwick.ac.uk/fac/sci/wmg/research/cav/humanfactors/projects/phd-in-micromobility-transport-modelling
For further information contact:
Alice Scott
Media Relations Manager – Science
University of Warwick
Tel: +44 (0) 7920 531 221
E-mail: alice.j.scott@warwick.ac.uk
Expert comment on changing the highway code to allow ALKS
Following the news today that "Motorists will be permitted to check e-mails and even watch TV at the wheel" under plans to legalise driverless ALKS (Automated Lane Keeping Systems) technology by the end of the year, Dr Siddartha Khastgir from WMG, University of Warwick shares his thoughts on changing the Highway code to enable motorists on the motorway to rely on technology with no human input when travelling at speeds under 37mph.
 Dr Siddartha Khastgir, from WMG, University of Warwick comments:
Dr Siddartha Khastgir, from WMG, University of Warwick comments:
"We welcome the UK Government publishing the results of the Call for Evidence for Automated Lane Keeping System (ALKS) from last year. ALKS is an important step on our journey to introduce self-driving car technology on UK roads. However, It is important to highlight that:
ALKS ≠ Self-driving car system. It is an important step on our journey to having self-driving cars.
Having said that, ALKS as a technology has a potential to provide lots of benefits but there are a few things that manufacturers, government/regulators and drivers need to be responsible for:
Regulators: Create a robust approval process for ensuring safety of ALKS. Ensure public education and any marketing of ALKS is done accurately and not mislead public.
Manufacturers: Establish and communicate true capabilities and limitations. This includes an elaborate and accurate representation of the Operational Design Domain (ODD) (i.e. operating conditions) of the vehicle
Drivers: Understand when they can and can not engage in activities like texting, send emails, watching movies etc. and their responsibilities when the system is active.
These are fundamental to ensuring safe introduction of ALKS and ensuring we reap the benefits."
ENDS
28 APRIL 2021
World’s largest public scenario database for testing and assuring safe Autonomous Vehicle deployments
§ It’s been widely stated that for Autonomous vehicles to be road-ready they have to be tested for at least 11 billion miles
§ For this to be viable virtual road scenarios must contribute towards these miles, and WMG at the University of Warwick and Deepen AI have made a globally accessible database of scenarios for Governments, manufacturers and researchers to test their autonomous vehicle technology
§ The Safety PoolTM Scenario Database and its role in enabling efficient testing will not only provide insights into the safety and readiness of Advanced Driver Assistance Systems (ADAS) and Automated Driving Systems (ADS), but will also help speed up the adoption of autonomous vehicles globally by providing the largest public scenario database in the world
The Safety PoolTM Scenario Database, the largest public repository of scenarios for testing autonomous vehicles in the world, has been launched today by WMG at the University of Warwick, and Deepen AI.
The database provides a diverse set of scenarios in different operational design domains (ODDs i.e. operating conditions) that can be leveraged by governments, industry and academia alike to test and benchmark Automated Driving Systems (ADSs) and use insights to inform policy and regulatory guidelines.
governments, industry and academia alike to test and benchmark Automated Driving Systems (ADSs) and use insights to inform policy and regulatory guidelines.
Initial scenarios have been generated using a novel hybrid methodology developed by WMG, at the University of Warwick, using both knowledge-based and data-based approaches. The Safety PoolTM Scenario Database will allow organisations to create scenarios in their own libraries, collaborate with other organisations via both shared and public libraries and enable the public to submit challenging real world scenarios.
Enabling scenarios to be matched to specific environments and operating conditions means that trials and tests can be undertaken in the simulated environment, controlled test facilities and on public roads, with evidence from each environment being used to inform our understanding of safe behaviours, bringing Autonomous Vehicles closer to market at pace.
It is becoming ever more apparent that Autonomous Vehicles and the Connected and Automated Mobility (CAM) that they enable are one of today’s most exciting technological advances with industry, academia and governments investing in the research and development of safe and secure Autonomous Vehicles.
CAM will provide a once in a lifetime opportunity to have a global impact on societal issues around road safety, traffic efficiency and emissions.
However, to ensure that Autonomous Vehicles are road-ready and will be safer than the average human driver, it has been suggested that they must be tested on 11 billion miles of roads, an insurmountable goal in the real world. Therefore, the ability to test on virtual roads in simulation environments is paramount for manufacturers and government bodies to ensure safe behaviours and assure that Autonomous Vehicles are a positive influence on road safety. The true test of an Autonomous Vehicles will not be in just the number of miles driven, but also the quality and complexity of those miles, leading to a wide spread industry adoption of a scenario-based testing approach to ensure that the Autonomous Vehicle’s behaviours and capabilities are ready for the real world.
Dr Siddartha Khastgir, from WMG, University of Warwick, holds a UKRI Future Leaders Fellowship enabling him to create methods to test autonomous vehicles over a seven year programme, having already worked on the UK Government’s Centre for Connected and Autonomous Vehicles and Innovate UK funded Midlands Future Mobility, which offers a real-world ecosystem for development and trialling of Connected and Automated Technology as part of the Zenzic coordinated CAM Testbed UK capability and was fundamental in the development of the scenario database which forms the core of Safety PoolTM initiative Siddartha stresses the importance of a global database of scenarios:
“Safety of automated driving systems is a hard research challenge and can only to solved by national and international collaboration and knowledge sharing. With the launch of Safety PoolTM Scenario Database, we are inching closer to seeing automated driving systems on the roads. Testing and validating automated driving systems transparently in an integrated simulation-based framework and in real-world scenarios will not only provide insights into the readiness of ADS, but also speed up the adoption globally. WMG and MFM are grateful for the support of CCAV and Innovate UK in developing the database and we are excited to be at the forefront of this revolution.”
“The Safety PoolTM Scenario Database lays a key foundation stone for autonomous vehicle safety” said Mohammad Musa, CEO & Co-founder of Deepen AI. “We are working closely with governments across the world to create a framework for ADS certification that will bring vehicle manufacturers one giant step closer to deploying safe and secure autonomous vehicles on the roads.”
AI. “We are working closely with governments across the world to create a framework for ADS certification that will bring vehicle manufacturers one giant step closer to deploying safe and secure autonomous vehicles on the roads.”
Scenarios in Safety PoolTM Database can be applied to a range of different autonomous vehicle systems, such as Automated Lane Keeping Systems (ALKS), which would see cars drive in an automated manner on motorways by adapting to speed and traffic around them, to trucking, to fully autonomous vehicles and even pods that could be used in town centres and pedestrianised areas as a ‘last mile’ mode of transport.
Safety PoolTM Initiative invites stakeholders to share learnings in the form of scenarios to expedite validation, testing and certification for the entire community.
Safety PoolTM Initiative is a global multi-stakeholder initiative with the mission of bringing transparent, certifiable safety to ADSs, uniting the autonomous vehicle community around standardised certification programs for ADSs worldwide.
Michelle Avary, Head of Automotive from World Economic Forum, comments:
“We are thrilled to work closely with Deepen AI & WMG, University of Warwick, to launch the Safety PoolTM Scenario Database. We believe Safety PoolTM Initiative is going to play a crucial role in standardising and bring transparency to ADS certification globally. We are already in advanced talks with many countries to adopt ADS certification frameworks based on Safety PoolTM database scenarios.”
Richard Morris, Innovation Lead for CAV at Innovate UK, comments:
“I am very pleased that the effort and hard work of producing this scenario database has been so successful and is now gaining the recognition it deserves. Scenario testing, both in simulation and physical tests, is widely recognised as the practical route to verifying the safety of ADS, and a comprehensive scenario database is crucial for that, and we are proud to have supported this work.”
Safety PoolTM initiative is welcoming government and industry stakeholders from all over the world to join the initiative and take the front row in bringing safety standards and certifications to their country. Members of the autonomous vehicle industry can also join the Safety PoolTM community and access safety scenarios to transparently test, validate and benchmark ADS. Visit http://www.safetypool.ai for more information.
ENDS
31 MARCH 2021
NOTES TO EDITORS
Images - credit WMG, University of Warwick.
Image scenario 1: Agent vehicle (red on the left) is cutting into ego vehicle's (grey) lane, while another agent vehicle (red on the right) is at front right position, on a motorway in a sunset condition
Image scenario 2: Ego vehicle (in black) is overtaking agent vehicle (red) on a motorway in a sunset condition.
Video available at: https://www.youtube.com/watch?v=YjO28ode6mU (credit WMG, University of Warwick)
Please visit https://www.safetypool.ai/ for more information.
About WMG, University of Warwick
WMG is an academic department at the University of Warwick and is the leading international role model for successful collaboration between academia and the public and private sectors, driving innovation in science, technology and engineering, to develop the brightest ideas and talent that will shape our future.
About Deepen
Deepen AI is a Silicon Valley based startup and the only safety-first data lifecycle tools and services company focused on machine learning and AI for autonomous systems. With tools and services that are customizable to suit the needs of enterprises as well as start-ups they have happy customers of every size across the globe. Visit Deepen.ai for more information.
About the Centre for Connected and Autonomous Vehicles
CCAV is a joint Department for Business, Energy & Industrial Strategy (BEIS) and Department for Transport (DfT) unit. Established in 2015, CCAV is an expert unit that is working with industry and academia to make everyday journeys greener, safer, more flexible and more reliable by shaping the safe and secure emergence of connected and self-driving vehicles in the UK.
Innovate UK
Innovate UK drives productivity and economic growth by supporting businesses to develop and realise the potential of new ideas, including those from the UK’s world-class research base. They connect businesses to the partners, customers and investors that can help them turn these ideas into commercially successful products and services, and business growth.
Heavy rain affects object detection by autonomous vehicle LiDAR sensors
High level autonomous vehicles (AVs) are promised by Original Equipment Manufacturers (OEMs) and technology companies to improve road safety as well as bringing economical and societal benefits to us all.
All high-level AVs rely heavily on sensors, and in the paper, ‘Realistic LiDAR with Noise Model for Real-Tim Testing of Automated Vehicles in a Virtual Environment’, published in the IEEE Sensors Journal, researchers from the Intelligent Vehicles Group at WMG, University of Warwick have specifically simulated and evaluated the performance of LiDAR sensors in rain.
 Using the WMG 3xD simulator, researchers tested an autonomous vehicle’s LiDAR sensors in different intensities of rain, driving around a simulation of real roads in and around Coventry. The simulator is a key part of testing autonomous vehicles, as they have to have been on several million miles of road, this therefore means that they can be tested in a safe environment that is the same as a real road.
Using the WMG 3xD simulator, researchers tested an autonomous vehicle’s LiDAR sensors in different intensities of rain, driving around a simulation of real roads in and around Coventry. The simulator is a key part of testing autonomous vehicles, as they have to have been on several million miles of road, this therefore means that they can be tested in a safe environment that is the same as a real road.
LiDAR sensors work by emitting numerous narrow beams of near-infrared light with circular/elliptical cross sections, these can reflect off objects in their trajectories and return to the detector of the LiDAR sensor.
One of the issues of LiDAR sensors is the degradation of its performance in rain. If a LiDAR beam intersects with a raindrop at a short distance from the transmitter, the raindrop can reflect enough of the beam back to the receiver, therefore detecting the raindrop as an object. The droplets can also absorb some of the emitted light, degrading the range of performance for the sensors.
Using different probabilistic rain models (none, to different intensities) researchers made it ‘rain’ the WMG 3XD simulator, and measured the LiDAR sensor’s responses to the rain, making a record of false positive and false negative detections.
They found that as the rain intensity increased it became more difficult for the sensors to detect objects. In a short range from the vehicle (up to 50m), 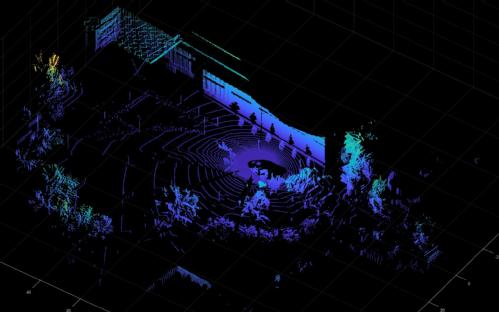 several rain drops were erroneously detected. However in a medium range, (50m-100m) this had decreased, but as rainfall increased to up to 50mm per hour, the sensors detection of objects decreased in conjunction with a longer range in distance.
several rain drops were erroneously detected. However in a medium range, (50m-100m) this had decreased, but as rainfall increased to up to 50mm per hour, the sensors detection of objects decreased in conjunction with a longer range in distance.
Dr Valentina Donzella, from WMG, University of Warwick comments:
“Ultimately we have confirmed that the detection of objects is hindered to LiDAR sensors the heavier the rain and the further away they are, this means that future research will have to investigate how to ensure LiDAR sensors can still detect objects sufficiently in noisy environment.
“The developed real-time sensor and noise models will help to further investigate these aspects, and may also inform autonomous vehicles manufacturers’ design choices, as more than one type of sensor will be needed to ensure the vehicle can detect objects in heavy rain.”
ENDS
25 FEBRUARY 2021
NOTES TO EDITORS
High-res images available at:
https://warwick.ac.uk/services/communications/medialibrary/images/february_2021/pic_1.jpg
Caption: The WMG 3xD simulator, used to test the LiDAR sensors
Credit: WMG, University of Warwick
{kind=link}
https://warwick.ac.uk/services/communications/medialibrary/images/february_2021/pic_2_.jpg
Caption: A virtual scan of the NAIC building generated with Intelligent Vehicle Group’s LiDAR model
Credit: WMG, University of Warwick
{kind=link}
Paper available to view at: https://ieeexplore.ieee.org/document/9354172
FOR FURTHER INFORMATION PLEASE CONTACT:
Alice Scott
Media Relations Manager – Science
University of Warwick
Tel: +44 (0) 7920 531 221
E-mail: alice.j.scott@warwick.ac.uk
WMG Assistant Professor joins Micromobility Research Fund
 WMG Assistant Professor of Human Factors, Roger Woodman, has been selected to join the Micromobility Research Fund set up by the Ford-owned e-scooter firm Spin.
WMG Assistant Professor of Human Factors, Roger Woodman, has been selected to join the Micromobility Research Fund set up by the Ford-owned e-scooter firm Spin.
Roger is one of only 12 academics selected to join the panel made up of experts from ten leading UK and US universities and industry. Together they will study various safety aspects of e-scooter use as well as rider behaviour, and the challenges and opportunities of the integration within a city’s road systems and existing public transport networks.
Roger Woodman explains: "Ultimately, the point of introducing e-scooter schemes is to advance our society and to bring a greater benefit to all, not just to the e-scooter riders and the service providers but to all who live in our towns and cities. Just as with many new services, this will require ongoing reflection and review from everyone, including the general public and stakeholders and the path may not always be straightforward. I’m confident that building a strong body of independent research will allow policy makers, e-scooter advocates, as well as sceptics, to advance the dialogue and put forward legislation that best supports everyone.”
Josh Johnson, Public Policy Manager at Spin, adds: “The willingness to share independent research and learnings about the adoption of e-scooters with key stakeholders has become less of a priority for operators and this needs to change. Spin is committed to improving and advancing micromobility policy frameworks globally in the markets we operate in. These studies will give everyone fresh and actionable insights. We look forward to sharing best practices with stakeholders in the UK and beyond around how to best integrate e-scooters into local transport networks while maximising safety of all road users and provide communities with a green, fun and socially-distanced way to travel.”
Safe travel behaviour will be at the centre of research topics and will build on Spin's solid research-based policy work developed in the US over the past two years.
Josh adds: “Our top priority has always been rider safety. All operators have a responsibility to their riders to not only exceed vehicle safety standards but provide a platform to educate riders on safety best practices and how to be mindful of pedestrians and other road users.”
Preparation for the first piece of research is under way in Milton Keynes. This study will explore factors that influence road-user safety including:
● Where do e-scooter users ride most often (cycle lane, roadway, pavement) and why?
● How often do safety incidents occur, and what are common factors?
● What factors or conditions (i.e. cycling infrastructure, weather, traffic volume, etc…) impact real or perceived safety of e-scooters for users and for non-users?
The study will be informed by a diverse set of data sources including qualitative and quantitative consumer survey data and on-street AI and IoT sensor data of e-scooter interactions with pedestrians, cyclists and cars captured by Vivacity Lab’s sensors that are installed in the city. The researchers will also have access to anonymised e-scooter movement data (GPS).
Vivacity’s roadside sensors employ machine learning algorithms to detect near-miss incidents and are able to analyse movement patterns of vulnerable road-users such as cyclists and pedestrians, as well as non-connected vehicles. Such data will be invaluable to assess why near-misses may happen and what could be possibly done to minimise them. All data shared by the sensors is anonymised with video feeds discarded at source, enabling safer roads without intruding on privacy.
The research may include outputs such as a mapping of “safe routes” based on riding patterns and user feedback, and recommendations on how local authorities and operators could encourage riders towards a safer use of e-scooters. Recommendations may also include infrastructure improvements or other policy changes to enhance roadway safety for all users.
Find out more about WMG’s Human Factors research here.
WMG Centre HVM Catapult hosts ’System Safety and Accident Analysis conference
WMG Centre HVM Catapult was proud to host the first virtual European STAMP Workshop and Conference (ESWC) from 21st-22nd October.
 The conference focussed on safety analysis of complex systems in diverse domains including self-driving cars, marine, aviation and healthcare. The conference brought together researchers and practitioners to hear more about Systems-Theoretic Accident Model and Processes (STAMP).
The conference focussed on safety analysis of complex systems in diverse domains including self-driving cars, marine, aviation and healthcare. The conference brought together researchers and practitioners to hear more about Systems-Theoretic Accident Model and Processes (STAMP).
STAMP is a new accident causality model based on systems theory, increasing our understanding of why complex systems fail, and helping to make them safer by predicting accidents and analysing hazards.
The varied agenda featured world-leading speakers from General Motors, Thales, Ansys, Codethink, as well as experts from the Intelligent Vehicles research group at WMG.
Presenters included Dr John Thomas from Massachusetts Institute of Technology and Professor Nancy Leveson (at MIT) who have introduced STAMP methods (STPA and CAST) to the world.
Over 300 people attended over the two days from more than 30 countries, including Japan, South Korea, Israel, Turkey, UAE, USA, Sweden, Finland, France, Russia and the UK, with diverse representation from both academia and business.
WMG has also been selected by the European conference steering committee to host the 9th European STAMP Workshop and Conference (ESWC) in October 2021. This is the first time the conference will be physically hosted in the UK, providing a valuable opportunity to showcase the UK’s world-leading capabilities in complex systems like Connected and Automated mobility (CAM) technology and systems, Electric Vehicles, Aviation and Marine.
Find out more about STAMP and WMG System Safety research here or contact Dr Siddartha Khastgir.
To register your interest in the 9th European STAMP Workshop and Conference (ESWC) in October 2021 click here.