Researchers from WMG at the University of Warwick have won gold at National Instruments Engineering Impact Awards 2018 for the WMG 3xD Simulator project. WMG’s 3xD Simulator is a world’s first-of-its-kind facility that enables autonomous vehicles to drive around in a virtual environment– accelerating testing before they are road ready.
Chief Engineer Gunny Dhadyalla, accompanied by colleague Dr Jakobus Groenewald, accepted the award for the Connected and Autonomous Vehicles category at the National Instruments Awards 2018 for the WMG 3xD Simulator Project on the 6 November 2018. This was topped off by more success as WMG then picked up the award for the overall Engineering Impact Awards winners.
The WMG 3xD Simulator Project was one of two finalists for an award in the Connected and Autonomous Vehicles category. As winners of this category, they faced stiff competition to beat the winners of other categories, who represented innovations from across Europe, the Middle East, India and Africa, to win the overall Engineering Impact award.
Our engineering team developed software for the British Motor Museum as part of their Future Mobility exhibition to highlight the trust people have in autonomous systems. We used the Unreal gaming engine to develop the virtual world and scenarios and had a working system finished in just two weeks.
CAVinSE
CAVinSE (Connected Autonomous Vehicles in Synthetic Environments
A key element supporting the introduction of Level 4/5 CAV will be the ability to independently certify that such systems are safe, reliable and secure. Not only must governments have methodologies for demonstrating that consumer products are safe, but the public must have confidence in this.
While testing and development of CAV has begun in the UK, a certification approach is required to underpin widespread adoption of CAV.
Among the options for delivering certification is the use of synthetic environments. Conducting validation of vehicles in simulators enables the creation of an almost limitless number of testing scenarios that are flexible, repeatable and safe.
Our engineering team at WMG investigated the pre-conditions required for creating such a testing environment. We also considered the need for such a simulator to be independently certified as an appropriate means of evaluating the safety of CAV.
Our team evaluated various software packages such as Carla, Airsim and XPI against requirements drawn from current automotive standards for autonomous and automated vehicles.
PNT Cyber Resilience: A Lab2Live Observer-based Approach
WMG’s project team successfully finished the collaborative ‘PNT Cyber Resilience: A Lab2Live Observer-based Approach’ feasibility study with Spirent Communications plc.
They provided a comprehensive online presentation to employees from the Centre for Connected and Autonomous Vehicles (CCAV), Zenzic and Innovate UK, who commended the quality and quantity of outputs in this three-month project, and their collaborative partnership and stimulating ideas for future exploitation.
The results from the academic review, expert panel interviews, and lab - and real-world based work by key researchers Dr Elijah Adegoke (Midlands Future Mobility), Dr Matthew Bradbury (Cyber Security Centre) and Dr Erik Kampert (HVM Catapult) were discussed, as well as the advice provided to the UK Government on how to best address the vulnerabilities of CAVs/CAM to GNSS jamming and spoofing attacks.
The project team, led by Dr Matthew Higgins, Professor Paul Jennings and Professor Tim Watson, presented two detailed reports in which they describe their successful research methodology for cyber-physical GNSS-attack testing on CAVs, and provide specifications and recommendations for a future CAV cyber-security testing facility in the UK. These reports will form a crucial part of CCAV’s consolidated report for public consumption, which will both highlight the successes and key learnings from all seven funded projects, as well as demonstrate that the UK is leading the thinking in this space.
Innovative Testing of Autonomous Control Techniques (INTACT)
What was the challenge?
Autonomous vehicle technology, such as driverless pods, will reduce congestion and accidents on our roads and give more people travel independence. Public confidence in the safety and security of the pods is one of the biggest barriers to the widespread adoption, but testing on public roads in real-world driving situations is expensive and potentially dangerous. In addition, future providers of driverless pod services will need cost-effective and dependable solutions that have been subject to rigorous standardised testing procedures.
What was the solution?
Autonomous Control Systems (ACS) are the brains of the pod, responsible for detecting objects and controlling the vehicle. In the INTACT project, Aurrigo pioneered the development of a low-cost ACS and collaborated with WMG
experts to develop methods for increasing public confidence through advanced testing.WMG developed a novel; methodology to create test scenarios extending research from Massachusetts Institute of Technology (MIT). In addition, the research team developed techniques for completely automating the testing of autonomous vehicles in simulated environments, including WMG’s unique 3XD driving simulator. This suite of test scenarios could be used to inform legislative frameworks and eventual certification of autonomous vehicles.
What was the benefit?
The INTACT project has enabled commercial benefits for Aurrigo, including significantly reducing the costs of their ACS and pods, patenting new
innovations, providing evidence from simulation-based testing for prospective customers, and generated future collaborative research funding through Innovate UK.INTACT has been a platform for WMG to represent the UK on the ISO technical committee on Intelligent Transportation Systems (ISO TC 204 WG14) and to lead development of a new international standard on Low-Speed Automated Driving (LSAD) systems. The research outcomes are also directly contributing to the new Masters Degree in intelligent vehicle technology, WMG MSc in Smart, Connected and Autonomous Vehicles.
“Self-driving vehicles will one day benefit all of us. WMG has been delighted to work with a world-leading local company on such exciting and innovative research, the results of which will help bring that day nearer.” - Prof Paul Jennings, Head of Intelligent Vehicles research at WMG
Our engineering team developed a demonstrator using our 3xD simulator with 360° display to show how we can control gantry signs on a motorway in a virtual environment. We also added some heavy rain and fog to the scenes.
NI/rFpro
NI/rFpro
Gathering and merging simultaneous real-time streams of data about the driving and connectivity environment, for example terrain, traffic and/or infrastructure objects etc. to relay to the Vehicle-Under-Test (VUT) are essential elements within driving simulators.
Our engineering team at WMG, together with National Instruments, achieved much of this capability using WMG’s 3xD driving simulator for Intelligent Vehicles (IVs), a National Instruments real-time platform running Carmaker with an rFpro visualisation system.
RACeD
RACeD
The RACeD, or Research for Advanced Concept Development, Doctorate Programme is a project funded by JLR with five Engineering Doctorate researchers investigating specific JLR research challenges. They will collectively advance JLR’s pathway to building up smart, connected and autonomous technology capability.
Smart ADAS Verification and Validation Methodology (SAVVY)
There is an emerging and strong demand for new techniques to enable the robust design and verification & validation (V&V) of ADAS features in a safe, repeatable, controlled and scientifically rigorous environment. This is driven by a number of challenges: reduced engagement of, and reliance on,
the driver in the driving task; the very high number and complexity of use cases & test scenarios; reduced access to prototype vehicles; and limited test time, human resources and cost constraints. The SAVVY project delivered a novel, efficient and accelerated simulation and simulator based V&V process for ADAS technologies. This project created the building blocks for the V&V of future technologies based on Field Programmable Gate Array (FPGA) using deep learning and Convolutional Neural Network (CNN) algorithms. These methodologies were evaluated throughout a product development lifecycle of a real-time ADAS control system. This project facilitated collaboration between AVL (consortium lead), Vertizan, Myrtle Software, Warwick University and Horiba MIRA, and brought together the learning and innovations from 3 Innovate UK funded feasibility studies.
Pod research opens up a swarm of market opportunities for Aurrigo
Driverless vehicles, also known as Connected and Automated Mobility (CAM), have the potential to change our lives. They will bring significant benefits, from making travel safer, cheaper and more sustainable, to increasing access to mobility for the elderly and disabled. As CAM technology develops, researchers are now looking at how these systems will work in the real world.
A transport system inspired by nature
Aurrigo teamed up with WMG and Milton Keynes Council on the Self-organising Wide area Autonomous vehicle Real-time Marshalling (SWARM) project. This Innovate UK-funded study investigated the potential of using ‘swarm’ intelligence (what bees or ants do when part of a colony) to manage fleets of driverless pods.
Currently, UK guidelines for testing automated vehicles state that you need a human in the supervision loop when the vehicle is moving, and the supervisor must hold the appropriate driving licence.
The revolutionary swarming concept is based on vehicles that “talk” to each other, communicating their position and platooning together where possible. This delivers a flexible and efficient fleet, enhancing pedestrian safety and minimising supervision costs – an critical factor for pod operators like Aurrigo.
Too many choices for selecting the most suitable simulation toolchains presents a challenge to system developers. Simulation is key to enable robust testing of Advanced Driver Assistance Systems (ADAS) and Autonomous Control Technologies. Many simulation packages can deliver simulation capabilities that focus on only a portion of the scenarios needed to ensure the robust performance of self-driving vehicles on public roads. Companies need to test across the whole spectrum from simulation (model) to simulators (vehicle and user) to real-world in order to build evidence of safety and coverage of scenarios.
When a company developing CAM products or services wants to take a comprehensive approach to virtual testing, where do they go, what do they choose? This is the challenge that the Interoperable Simulation project sought to address through the collaboration of the UK CAM testbed partners, Millbrook Proving Ground (Millbrook-Culham Urban Testbed), WMG (Midlands Future Mobility), Smart Mobility Living Lab: London (SMLL).
Figure 1: View of the test car in the 3xD Simulator facility at WMG, Warwick University driving in the Warwick Campus World Model
The solution
The consortium created a proof of concept for interoperable simulation capabilities across CAM Testbed UK sites. Creating scenarios derived from real-world environments in an interoperable format allowed the customer to move between sites easily to carry out similar tests in different environments. For example, user-centric testing combined with hardware and software in the loop testing of autonomous systems meant the customer could choose the WMG 3xD Simulator for Intelligent Vehicles as the most appropriate solution.
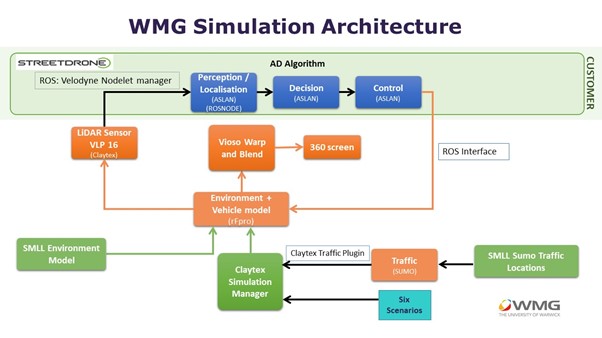
Figure 2: Software architecture of the proof of concept at 3xD Simulator facility, WMG, Warwick University
Figure 3: Views of the test car and from inside the car in the 3xD Simulator facility at WMG, Warwick University driving in Holyhead Road (pictures in first row) and Coventry City Centre (pictures in second row) World Models.
WMG's Unique Contribution
Through MFM, WMG has pioneered the work on scenario databases and recently launched Safety Pool, a global scenario database sharing platform. The project integrated the scenario database with all the testbed simulation environments, providing remote access to the scenarios through the database API.
WMG’s leading work on the scenario description language (SDL) was used to define the real-world test scenarios selected to test the StreetDrone Autonomous Control System.
WMG’s secure-by-design 3xD simulator, housed in a Faraday Cage to isolate from the outside world, was used to develop the integrated simulation demonstration at WMG. This included implementing the technical architecture, the system developer’s autonomous control system with the Vehicle-in-the-Loop, the scenario integration and the simulation management tools.
How can it help industry?
Interoperable simulation capability across the UK testbeds puts the UK in an extremely competitive position giving system developers a great choice of offerings to accelerate and de-risk technology development from Model-in-the-Loop, to Hardware-in-the-Loop, to Vehicle-in-the-loop and to User-in-the-loop.
The WMG architecture allows the creation of many thousands of scenarios, running them in a fully closed-loop simulation test environment, in a safe and repeatable manner.
Using our simulation manager and state-of-the-art sensor models, we can create bespoke virtual environments. We used powerful gaming technologies such as Unreal, as well as high quality, real MFM mapped and rendered routes (rFpro) to test a customer’s ADAS and ACSs technologies. This takes away the reliance on expensive and time intensive real-world testing.
Our talented simulation, modelling and testing experts can create test scenarios and virtual weather environments such as rain, to evaluate system robustness.
The architecture allows the integration of traffic modelling through the open source SUMO tool. We can create randomly generated traffic or scripted traffic to evaluate how real control systems behave.
If our customers need to evaluate real user responses to the technologies, our 360 degree projection immersion is ideal, complimented by our extensive knowledge in running simulator based trials and evaluations.
Figure 4: View from the test car and VR interface in the 3xD Simulator facility at WMG, Warwick University
Who can it help?
Our ability to help has expanded with the development of the interoperable simulation platform. With our extensive experience in Models-in-the-Loop, Software-in-the-Loop, Hardware-in-the-loop, User-in-the-Loop and Vehicle-in-the-Loop testing we work with a breadth of talented UK companies developing on-vehicle technologies, sensor models, test systems, simulation and emulation technologies.
We provide our partners with a selection of relevant mechanisms to engage with WMG’s Intelligent Vehicles Group. These range from MSc projects, internships and Knowledge Transfer Partnerships, to collaborative Research & Development and directly funded research where our partners gain maximum benefit from research outputs.
Figure 6: View from the test car in the 3xD Simulator facility at WMG, Warwick University, driving in the SMLL World Model.