Deep Neural Networks and the role of accurate bounding boxes in datasets
This project is aligned with the current activities of the Intelligent Vehicles (IV) Sensors Group.
Environmental perception sensors (i.e. cameras, LiDARs, RADARs, etc.) are the interface between assisted and automated driving functions (either the real system or a virtual one) and the real or simulated world. Sensors are the enablers for future mobility, infrastructure management, robotics, and industrial automation by linking the real world with automation systems. The focus of our group is "Robust Sensing" as the quality of sensor data is key for any decision making process in these systems, either based on traditional algorithms or AI-based ones.
Project Description
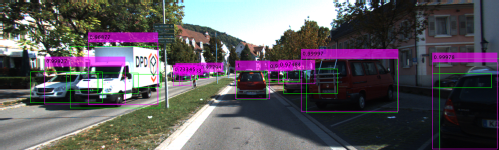
Automated vehicles and advanced driving assistance systems are increasingly using machine learning for more perception tasks based on images, such as object detection, tracking, prediction, etc. [1-2]. A common approach for training Neural Network (NN) algorithms is supervised learning, which requires suitable labelled datasets, with sufficient variability and also accurate ground truth. In the case of object detection, the ground truth is commonly represented by the bounding boxes around the objects that need to be detected. However, variability and errors in the bounding box quality (size, position, etc.) might have an impact on NN learning process. The processing of labelling the ground truth has not been automated (but cannot be fully automated) nor standardised yet [3].
As a part of this project the intern is expected to carry out most of the following tasks:
- Understand the importance of using datasets when developing automated vehicles and inspect some of the common automotive datasets and their ground truth;
- Review the state of the art of machine learning based object detection and evaluation metrics in automotive;
- Work with the team and industrial partners to identify shortcomings, defects, etc. in the ground truth of common automotive datasets;
- Correct the ground truth of a benchmarking dataset in automotive and generate an updated version of the dataset;
- Contributing to build, train and evaluate a demonstrator to show the effect of ground truth variations on the neural network performance;
- Participate to group meetings, interact with the wider sensor team and industrial partners.
Refs
[1] S. Kuutti, R. Bowden, Y. Jin, P. Barber and S. Fallah, "A Survey of Deep Learning Applications to Autonomous Vehicle Control," in IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 2, pp. 712-733, Feb. 2021.
[2] D. Feng, A. Harakeh, S. L. Waslander and K. Dietmayer, "A Review and Comparative Study on Probabilistic Object Detection in Autonomous Driving," in IEEE Transactions on Intelligent Transportation Systems, early access, pp. 1-20, 2021.
[3] Laflamme CÉ, Pomerleau F, Giguere P. Driving datasets literature review. arXiv preprint arXiv:1910.11968. 2019 Oct 26.
Required Skills
This activity requires excellent coding skills; basic knowledge of deep neural networks is a plus. The Intern should have an interest in automated/intelligent vehicles, sensors, and machine learning. This project requires a very well organised person, with good management skills and willing to interact with different scientists in the Intelligent Vehicles research group and with industrial partners. Good communications skills and previous experience in sensors and/or scientific communications/research are a plus.
Apply for this Project
If you wish to apply for this project, fill in the form below including uploading your CV and personal statement, explaining why you want to do this particular internship project. Attachments must be in PDF format.
