Magdeburg 2012 - News Feed
Day Four Finals
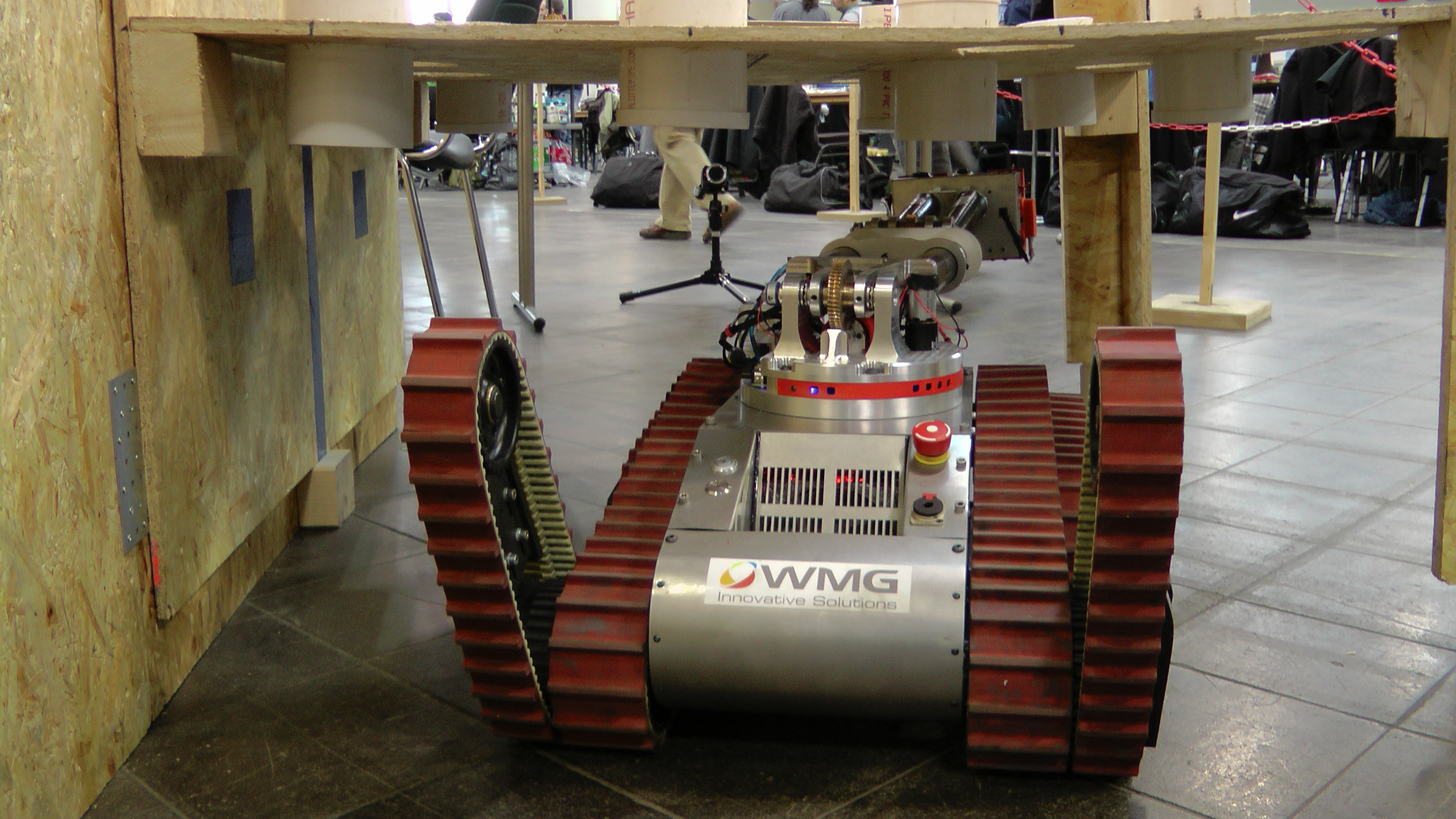
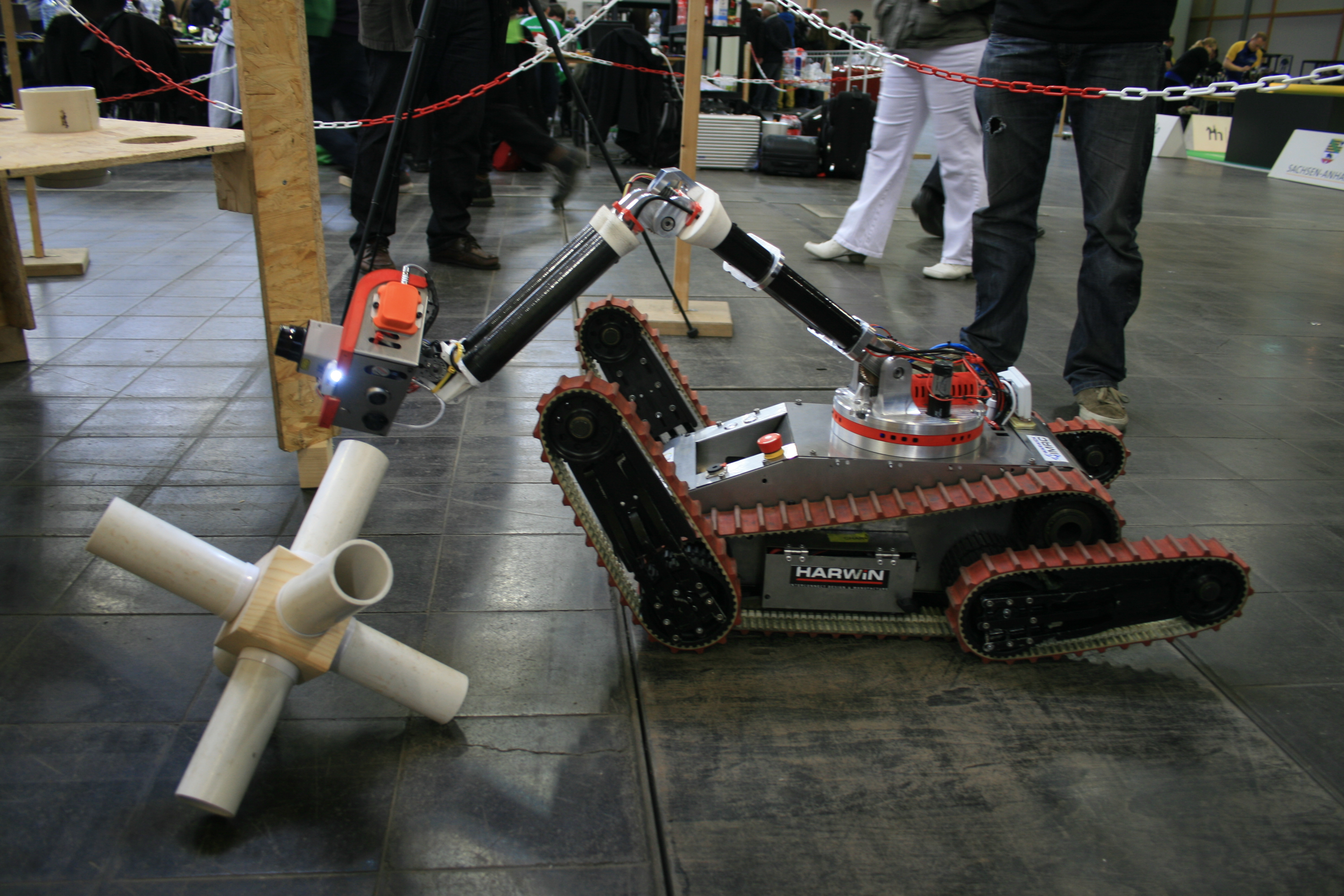
We entered the best in class for manipulation this morning, we were the only competitive robot to enter this particular contest as we were the only robot with a working jointed arm with a mounted camera. we suceeded in identifying all the required points on a special table with codes obscured in pipes facing both up and down. This required driving the robot arm effectively upsidown and using the tilt of the head to get the camera facing directly upwards. The robot was steered using the rear camera offset from centre giving full view of the arm and the rear flippers. As we identified the maximum number of points we were then asked to identify the point star. Due to time constraints we weren't able to identify all the required points on the star but we did identify the two required ones. This won us the best in class for manipulation.