
Autonomous Quadcopter
About
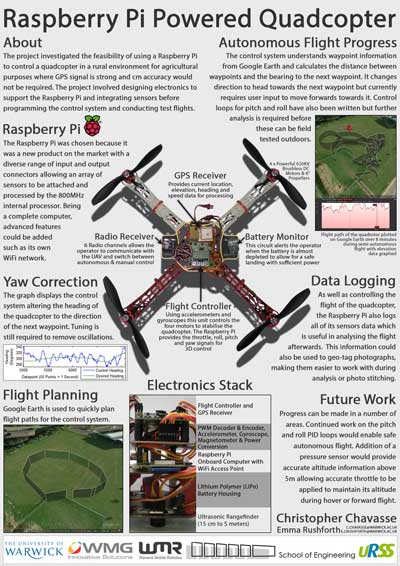
This project investigated the feasibility of using a Raspberry Pi computer to autonomously pilot a quadrotor along a predetermined route of GPS coordinates. Firstly the control circuitry required was investigated and a specification put together. The circuit was then designed and constructed to interface with the Raspberry Pi and a multi-rotor stabilisation circuit.
The circuit was built and tested successfully. It utilised GPS, and a 3-axis accelerometer and magnetometer to provide location and heading data and two microprocessors, one to decode the PWM input commands from an external antenna from a remote control and the second to encode PWM signals and send them to the stabilisation circuit. Software was written for the Raspberry Pi which took the data from this sensor circuitry and processed it alongside the user defined waypoints to calculate how to move in order to reach the next waypoint.
By the end of the project the quadrotor was not completely autonomous however was very close and was turning and facing the direction of the next waypoint. It was found that to maintain altitude whilst flying a pressure sensor would be required which could not be acquired before the project finished. With the addition of this sensor and fine tuning of the control loops this system has the capability of fully autonomous flight.
Poster
(Click to Download)