
Magdeburg 2012 - News Feed
Sit. Rep.
So, the competition starts tomorrow, our first run is at 11am European time (so wish us luck)!
Today and yesterday were set-up days, we've been hard at work trying to get it all working, with varying success.
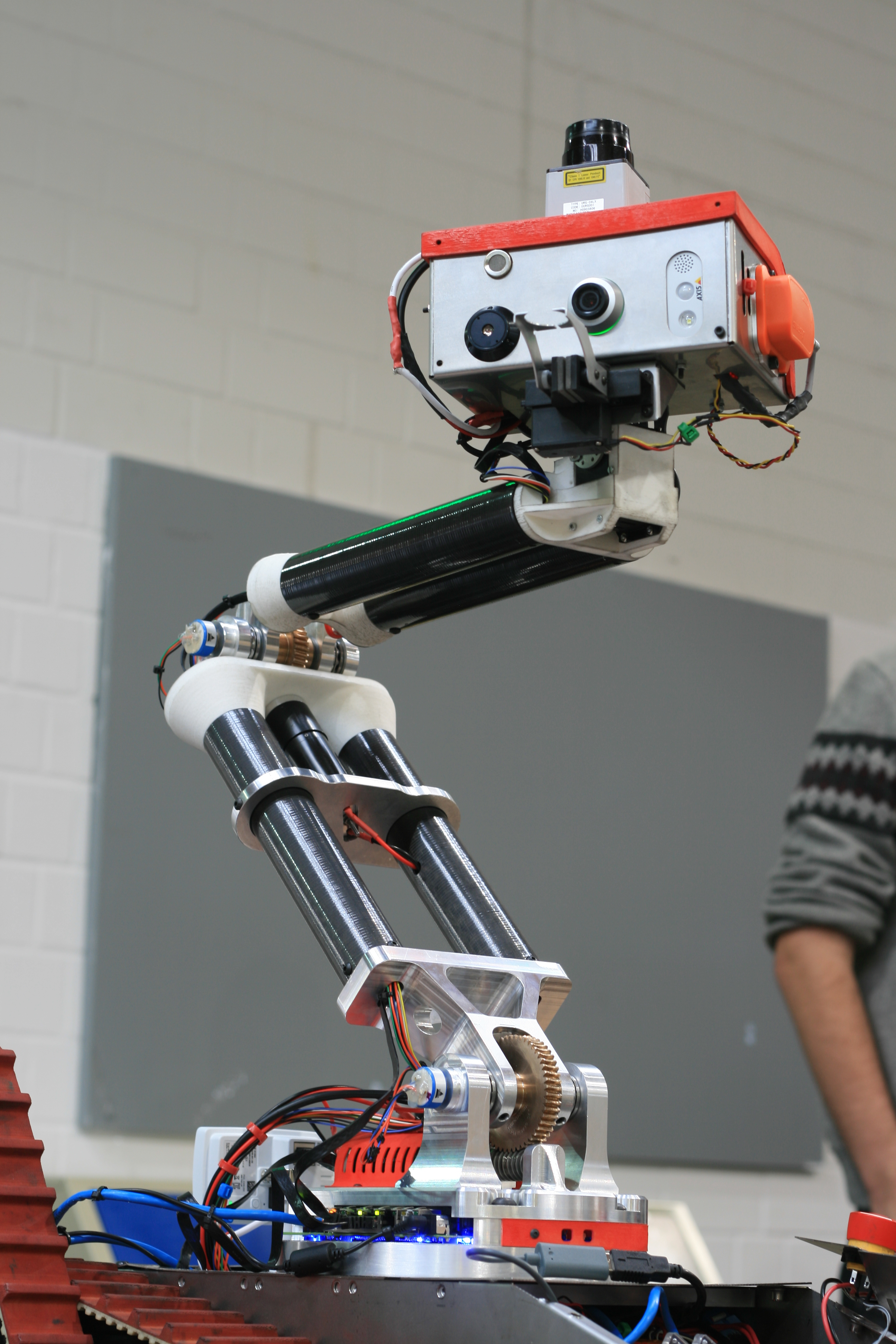
Mechanically the arm is working great, but the kinematics (allowing for easy positioning) are proving a little tricky to work properly. For the first run tomorrow we have implemented manual joint control and attempting a bodge using the proven kinematic model for the simpler 2008 arm.
The arm does look good though!
The chassis is holding up with the only major problem being an occasional voltage drop on the 5v rail (powering cameras and other sensors), this is being fixed by installing an additional 5v converter. The flippers still seem to lack power, but this shouldn't pose a problem.
We've arrived at Magdeburg!
We have now arrived at Magdeburg for the RoboCup 2012 German Open.
The next two days are set-up days. We have a few things to finalise before the start of the actual competition on Friday (30th March), such as the arm kinematics and a few other niggles. We will keep you posted on the progress of this.
The competition is held between 30th March and 1st April.
We will be continually updating the competition news feed will be uploading photos and videos here.