
Vision System
|
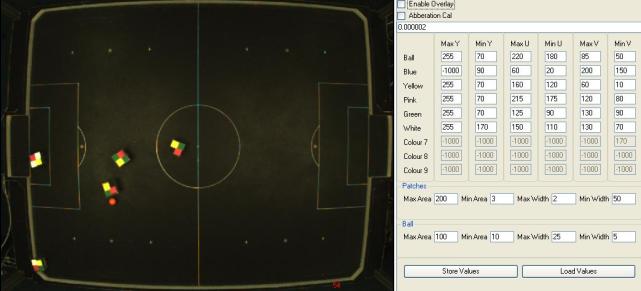
The vision system is used to determine the position and velocity of each robot and the ball. To capture the images of the pitch, a machine vision camera, running at 60 frames per second, is positioned over the pitch. The images from this are fed back into a server, which analyses them to determine the required information.
|
|
|
To aid in the identification of each robot, and the team for which they play, a pattern of four squares is placed on top of them. One of these squares will represent the team, being either blue or yellow in colour. The other three squares are a unique combination of green, magenta, black or white, allowing a particular robot to be identified and it's orientation determined. |