
Magdeburg 2012 - News Feed
Results!!!!
It's all over, we've had the awards ceremony, dismantled the arena and packed the van....
We achieved second place in the robocup rescue comp. We also gained the best in class awards for mobility and manipulator! Hurray!
Will upload the rest of the videos and photos when we are back in the UK as our internet connection here is verrrryyyy sllloooowwww.
Mobility Run
Slight accident to start with (I'll leave it to you to spot the problem)...
We reset, re-attached the camera applied some hot melt glue and we were off again (don't worry the arm wasn't attached)... Managing one and a quarter laps of the stepfield.
That should be enough for us to win the best mobility title, but we won't know until the awards ceremony in two hours.

The remaining videos will be uploaded at somepoint this week.
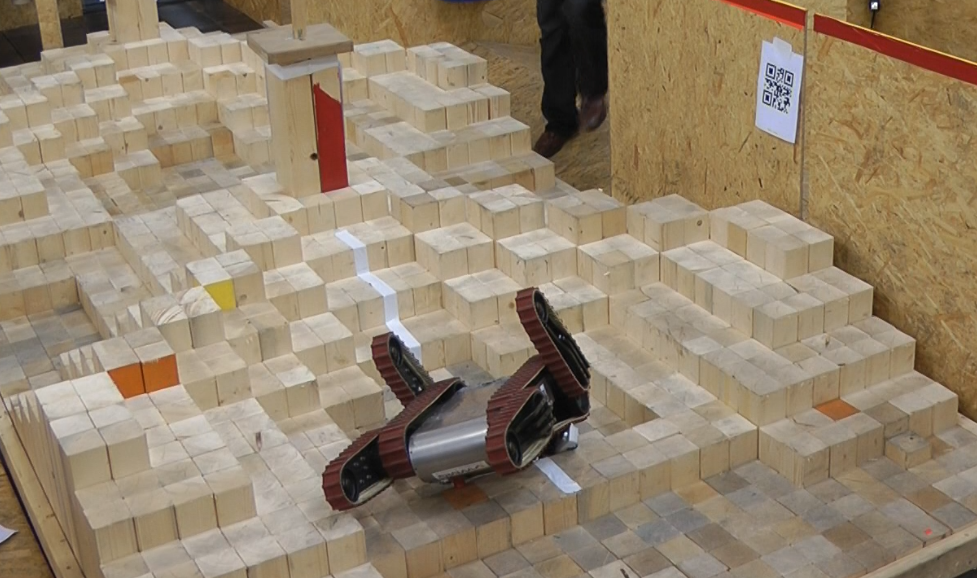
The Final Run
The final compeition run didn't go to plan...
All started off well, we headed for the stepfield, found a red victim and a few QR codes. However, then there was some confusion and the robot ended driving off the tallest part of the stepfield. Luckily no real damage, but the head fell off and the resulting tug in the wiring mean we couldn't get the front camera working before the end of the round. :(.
Here are a few stills from the video:-

Robot has now been fixed for the mobility run in 10 minutes!
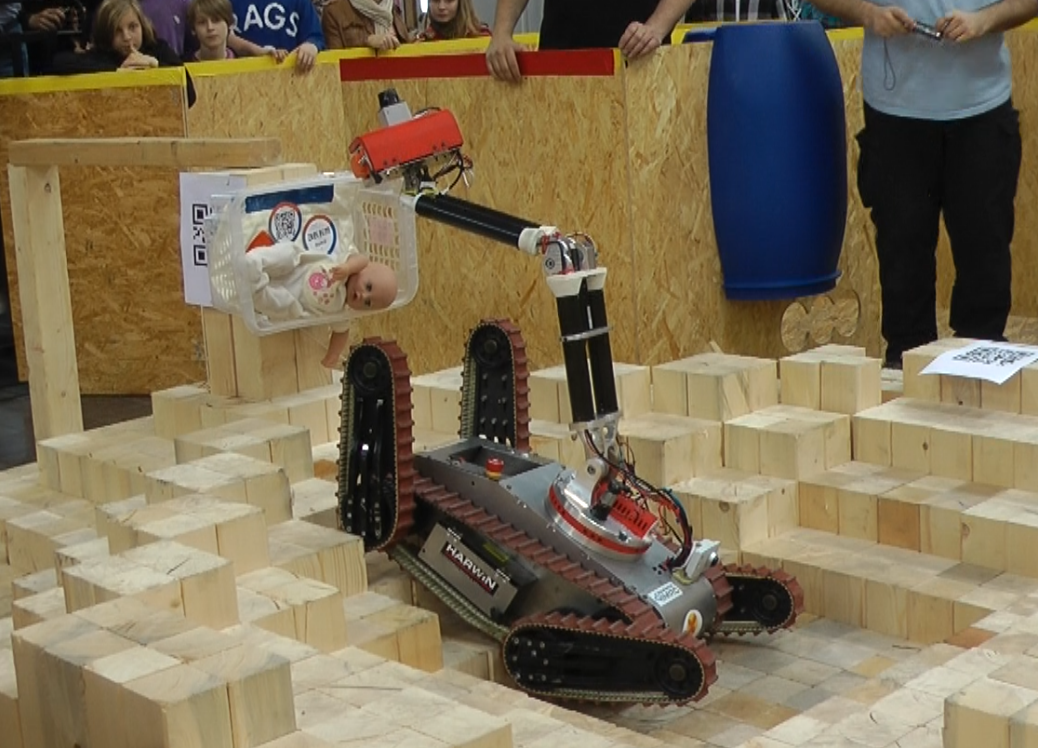
Day Four Finals
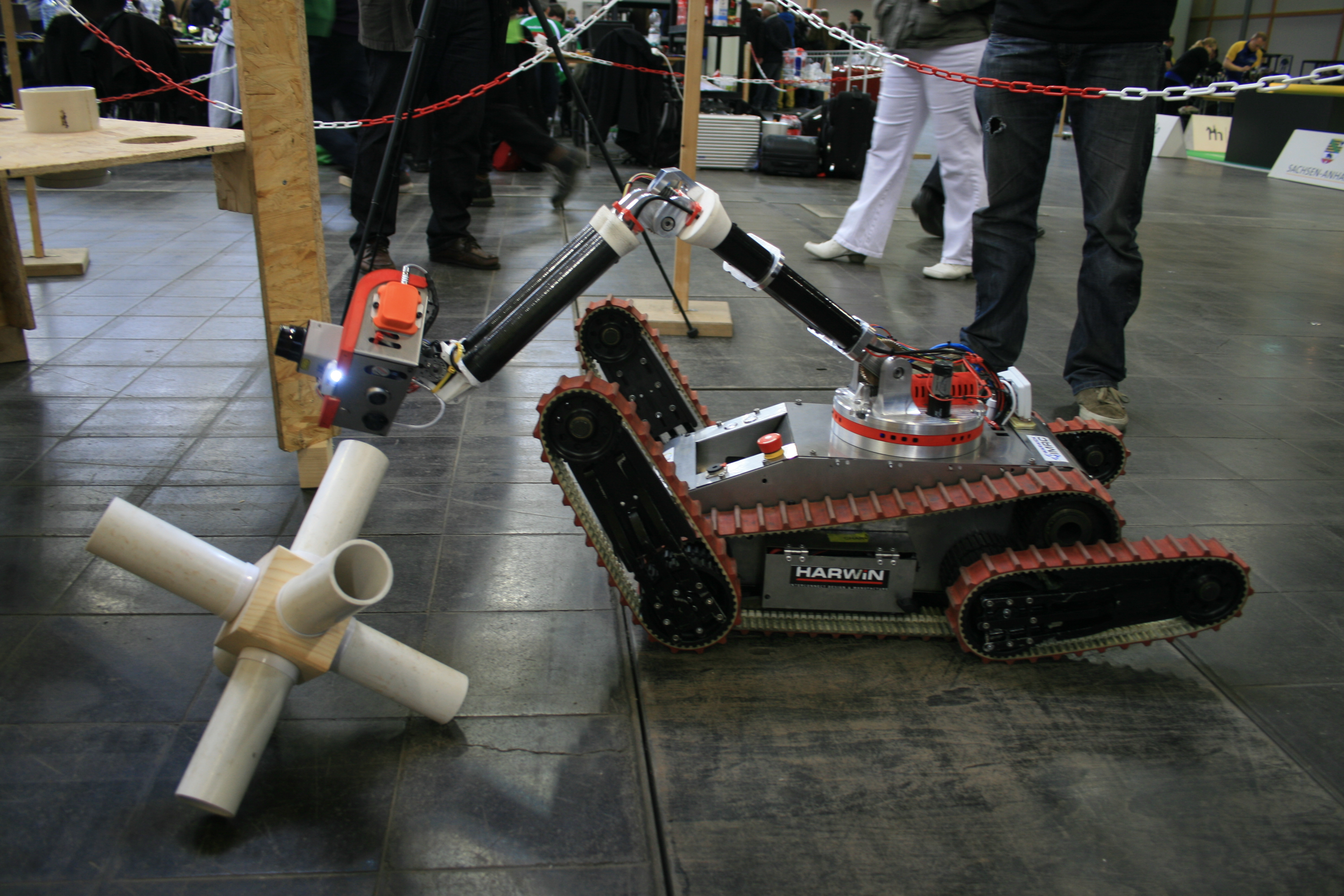
We entered the best in class for manipulation this morning, we were the only competitive robot to enter this particular contest as we were the only robot with a working jointed arm with a mounted camera. we suceeded in identifying all the required points on a special table with codes obscured in pipes facing both up and down. This required driving the robot arm effectively upsidown and using the tilt of the head to get the camera facing directly upwards. The robot was steered using the rear camera offset from centre giving full view of the arm and the rear flippers. As we identified the maximum number of points we were then asked to identify the point star. Due to time constraints we weren't able to identify all the required points on the star but we did identify the two required ones. This won us the best in class for manipulation.
Good News
We've been told that we are currently in second place with 238 points (leaders have 250).
This mean we will be entering the finals tomorrow. Not only that, we will also be competing in the mobility and manipulation challenges. It will be a busy day!!!
Day Two Summary
We finished today's runs on a high note today. After scoring 40 points yesterday we managed to score a total of 65 in the first run and hopefully a few more in the second run. We are accurately identifying victims in high scoring places and fulfilling a lot of the criteria required to score the high marks. We are still struggling to control the robot accurately at times due to the lack of flipper sensors, this was the source of some amusement on the stairs as we were balanced in a very precarious position whilst trying to identify a very awkwardly placed victim on the stairs which no other robot could identify.
We also scored a few points on an object called a point star. This is seen in some of the videos shown on our website and consists of a wooden cube with a two inch diameter pipe on each face showing obscuring a QR code so only robots with manipulators could access. We succeeded in identifying some of the QR codes on this point star but due a few errors in the kinematics we weren't able to score maximum points on this challenge.
The mapping system implemented on the robot was very accurate but provided very unreliable data when going up stairs, the maps generated were usable but the lack of a recognised file format meant that the judges may exclude any maps which aren't in the Geotiff format.
We will be uploading videos over the next few days to keep you up to speed
Second Run Video
Here is the second video as promised:
Second Competition Run
The video from our second run will be available shortly. A lot smoother than the previous run however we do need to limit the motor torque to limit damage being done to the arena by poor driver control.
First Competition Run
So we've just done the first competition run. We scored one victim in the red area, but the main motors stopped responding so we had to abort the run.
Here is a video of the run, watch it in HD!
It would seem that the main track motor controller isn't responding, not exactly sure what the problem is, but we've got a few hours to fix it (luckily we have a spare if needs be!).
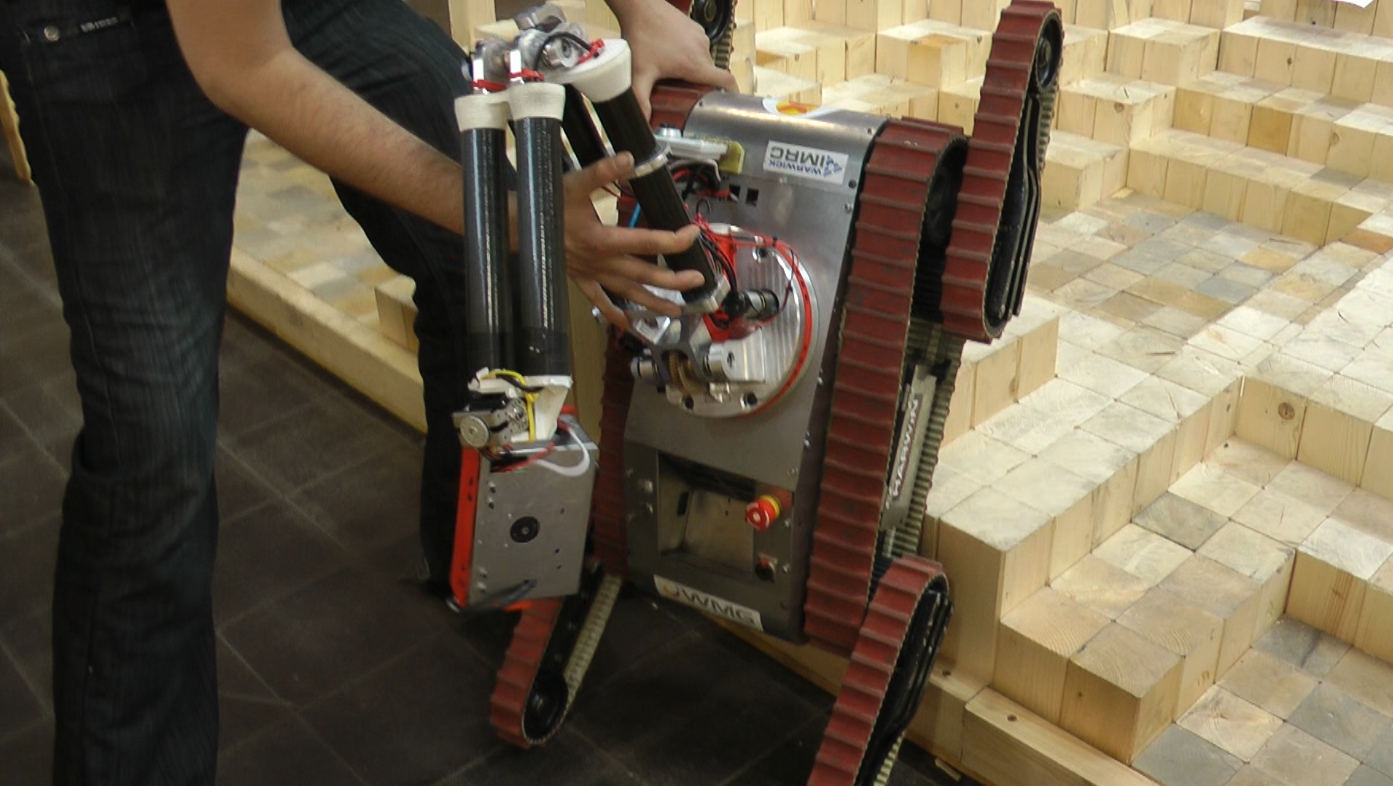
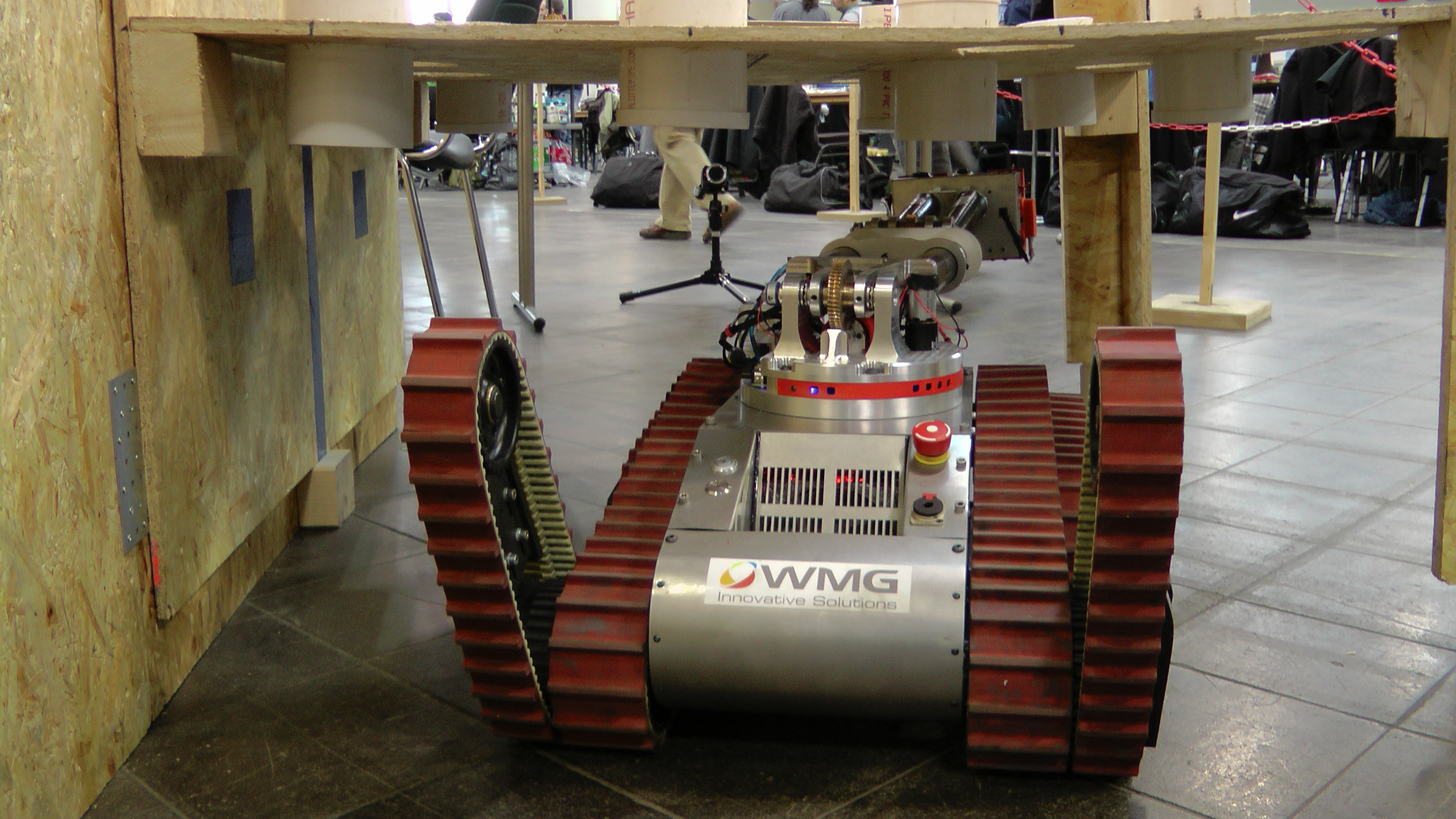
Testing
We put the robot into the arena to test it in the conditions it will encounter tomorrow.
The robot handled very well, perhaps some more driver training is needed ;).
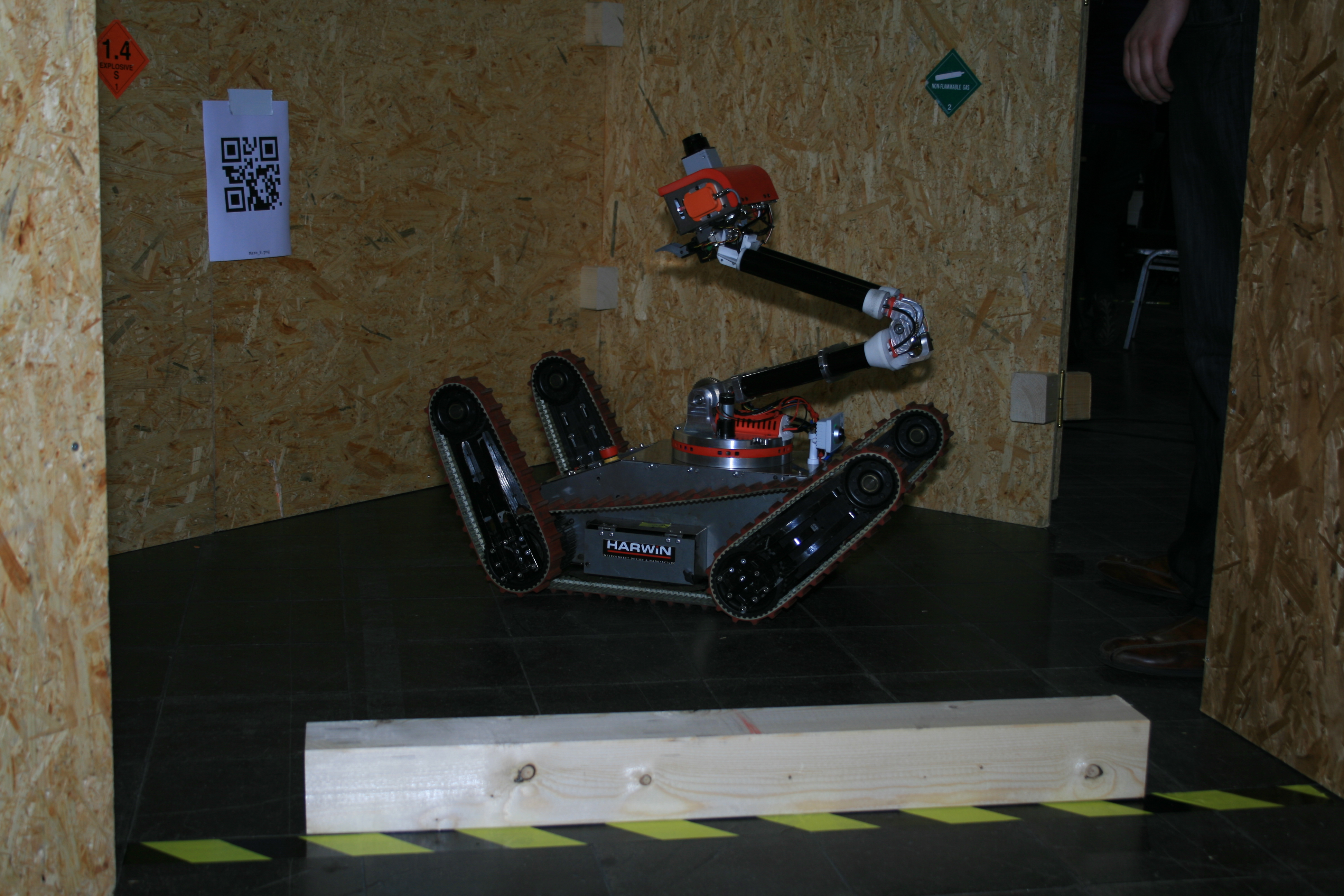

The 45degree ramp is still easily climbed...



It also happily tackled the red step-field but suffered a bit of an injury, luckily can easily be fixed with a set of allen keys.



We will now focus on getting the arm kinematics up and running and improving the overall reliability of the robot in time for our first run tomorrow.
We will keep you posted!