Unmanned Aerial Inspection Vehicle - News
It's all coming together...
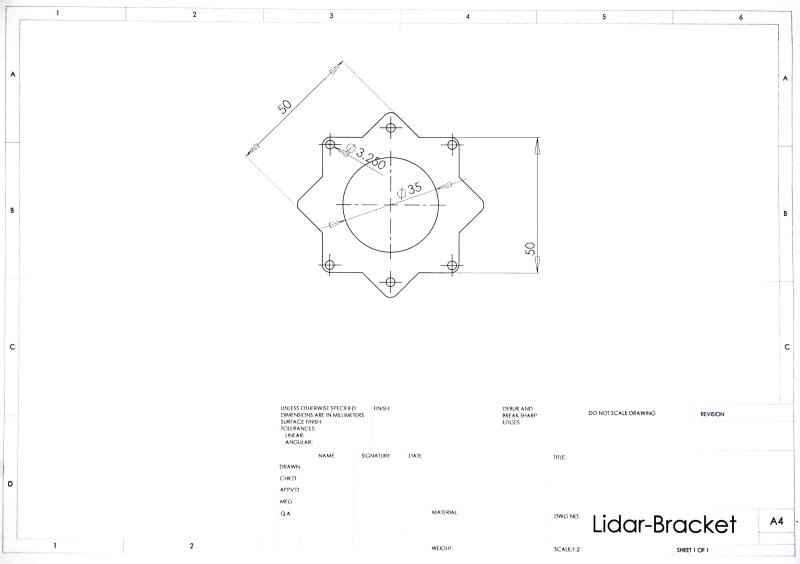
The mounting brackets that were designed last week have now been manufactured.
The bracket that holds the LiDAR to the top of the helicopter is pictured below, it was laser cut out of 0.7mm stainless steel.

The second bracket bolts on to the underneath of the helicopter and holds the battery, computer and power distribution board. Also made of 0.7mm stainless


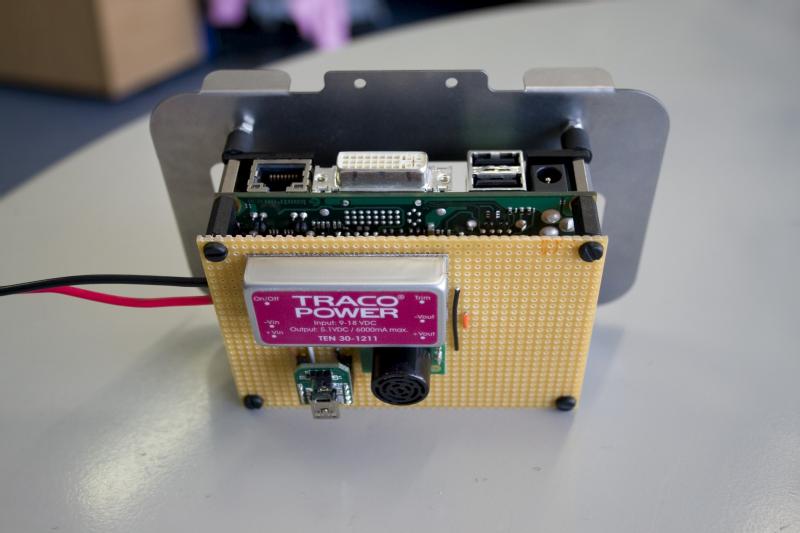
Here is a photo of the computer stack without wiring. The brown board closest to the camera still has a few components that needs attaching. These components will allow the computer to control the heli.
Both the LiDAR and the computer stack attached on the helicopter, still no wires (that is a job for next week).

You can see all the photos here: http://www2.warwick.ac.uk/fac/sci/eng/meng/wmr/projects/uav/photos/mountingthesensors/
The Helicopter Flies!
The HexaKopter finally arrived last week.
It came as a kit with "some assembly" required and just over two days of work later it was assembled and ready to fly!
Some pictures of the build can be seen here.

The MikroKopter flies very well, the vibration is surprisingly low, it is very fast and agile (although something that I don't really want in this project) and is very very stable platform. Much better than I expected.

I am now investigating how to mount the sensors and onboard computer so I can start to collect data and try to automate it.