
Sample path large deviations and concentration
Supervisors: S. Adams, R. Tribe
 We consider random height fields
We consider random height fields over a box
, distributed under the Gibbs measure
We say these height fields are in dimensions and we may think of this measure returning the probability that a particular height configuration lies within the tube
. We call the elements of
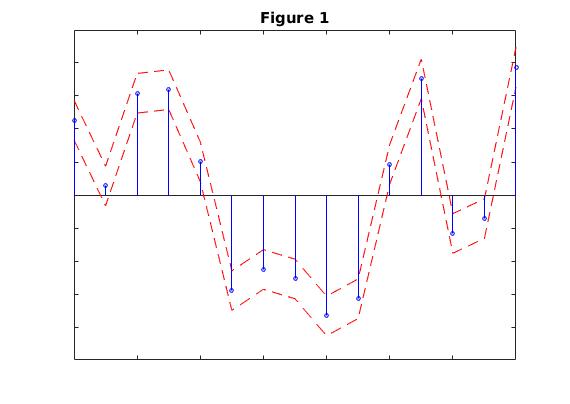
particles, or heights. An example in
-dimensions is shown in Figure 1.
is a normalising factor, called the partition function , and ensures our measure is a probability measure.
is the Hamiltonian for our system, and takes the form
, where
is the discrete Laplacian and
is called the Potential, discussed later. In our case, the boundary is given by
.
To impose boundary conditions on our height field
, we adapt our measure to take the form
We can see the extra product at the end of the right hand side will ensure our boundary conditions are satisfied, else we see the probability of finding a height configuration without the boundary conditions to be zero.
From these height fields, we can define the macroscopic height functions as follows:
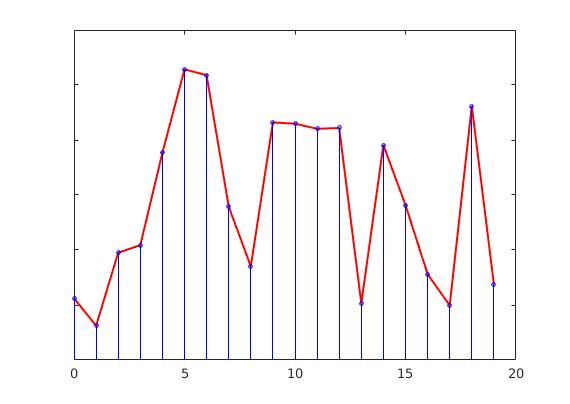
Below we can see some typical height fields for various , pictured in blue, and their corresponding height functions (before scaling) in red. Notice that as
, our height functions appear to be converging.
Finding LLNs for is acheived through the use of large deviations. Indeed, minimisers of the rate function associated to the measures
correspond to LLNs for the height functions
for a suitable class of admissable functions. For instance, in
-dimensions we take the space
for the problem with both end points and initial velocities fixed.
By changing our measure , we may consider different variants of the model we have introduced here. For example, we may force our particles to be positive (wetting), or even give our particles an attraction the the '0 line' (pinning). These cases are discussed under later sub-headings.
The potential always undergoes the assumptions
Occasionally, we make the stronger assumptions
is twice continuously differentiable.
is strictly convex,
.
The potential usually considered is the Gaussian potential, . This has many advantages as Gaussian potentials yield very nice bounds, due to Gaussian calculus.
The other potential often considered is of general type, needing only satisfying the assumptions above.
There are two types of particle interactions that are commonly considered, one is called the Gradient interaction, and the other is the Laplacian interaction.
The laplacian case is defined by the interactions . For this, we take our boundary to be
.
The gradient case is defined by the interaction . Here we take a boundary of the form
. Unlike the Laplacian interaction, the height functions undergo a scaling by a factor
, so we consider
, instead of considering
. The majority of the work in this area has been dedicated to the gradient case, and as such there are many results for this type of particle interaction. This case is easier than the Laplacian case, as potentials considered with a gradient interaction have the markov property, and hence may be considered as random walks. This gives us extra theory to get bounds for large deviations.
Pinning can be loosely be described as 'an attraction to the 0 line'. More precisely, it is defined as a limit of a particular choice of potentials. In the limit, we obtain Pinning through the measure
As we can see, the extra term corresponds giving our height fields
a 'reward' for touching the '0 line'.
 Wetting is when we force our height functions to be positive everywhere. Unlike the case of pinning, wetting is conditioned on to our measure in a hard fashion by considering
Wetting is when we force our height functions to be positive everywhere. Unlike the case of pinning, wetting is conditioned on to our measure in a hard fashion by considering . In the case of wetting, our analysis becomes more interesting as we minimise over the convex space
, which gives rise to obstacle and free boundary problems.
Acknowledgements
We acknowledge the funding body EPSRC and the support from MASDOC CDT.
![]()