WMG News - Latest news from WMG
Researchers use smart roadside infrastructure and Vehicle-to-Everything technology to support connected and automated vehicles with motorway merging
As part of the AutopleX (Autonomous Cars Negotiating Complex Environments Using V2X) project consortium, researchers at WMG, University of Warwick,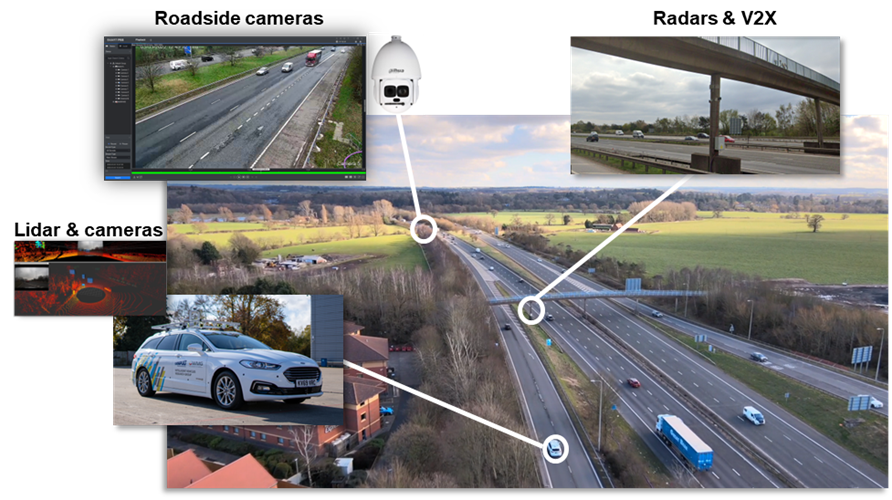 have used a connected smart roadside infrastructure and onboard vehicle systems to demonstrate how to enhance the vision and perception of future autonomous vehicles to achieve safer and more comfortable manoeuvres along high-speed junctions, such as motorway merges.
have used a connected smart roadside infrastructure and onboard vehicle systems to demonstrate how to enhance the vision and perception of future autonomous vehicles to achieve safer and more comfortable manoeuvres along high-speed junctions, such as motorway merges.
The Centre for Connected and Autonomous Vehicles (CCAV) and Innovate UK have jointly funded £2.6m for the collaborative R&D project AutopleX between March 2019 and September 2022.
AutopleX brought together WMG and leading automotive and mobility management partners Jaguar Land Rover (JLR) and Yunex Traffic, as well as public bodies such as Transport for West Midlands (TfWM) and National Highways.
Supported by the WMG Centre High Value Manufacturing Catapult, engineers and researchers at WMG have built a proof-of-concept demonstrator, where technology within a test vehicle (also known as “the EGO vehicle”) including Global Navigation Satellite Systems (GNSS), LiDAR and cameras, was fused with infrastructure-based sensing received over a Vehicle-to-Everything (V2X) communication system. This created a more comprehensive understanding of the environment in which the vehicle was travelling.
Colin Teed, AutopleX Project Manager at Jaguar Land Rover, stressed that: “Merging at high-speed junctions will be a standard action autonomous vehicles must perform and constitutes an important step in realising the vision of connected and automated mobility.”
Professor Mehrdad Dianati, Head of Intelligent Vehicles Research at WMG, added: “Onboard sensors may suffer from several limitations such as occlusions, limited range, and other forms of impairments. Especially at motorway junctions, where the speed of vehicles is usually high, undetected traffic objects by the onboard sensor suite can impose severe threats on safety. Onboard perception can, therefore, become insufficient as a standalone solution for level 4 autonomy. In this regard, the AutopleX project has developed a proof-of-concept solution that combines, in real-time, the onboard perception of a connected vehicle approaching a motorway with infrastructure-based sensing for supporting a safe merge.”
The AutopleX showcase demonstration took place via a live road traffic environment at Junction 15 of the M40 in March 2022. Yunex Traffic developed the roadside perception system, including three radars and V2X communication technology, while National Highways ensured its safe installation and effective operation.
Jet Feng, Project Engineer at WMG, explained: “The roadside perception including the locations, speed and steering angle of motorway vehicles was continuously broadcast (in the form of collective perception messages (CPMs)) and received by the vehicle’s onboard communication unit (OBU) on the Open Innovation Vehicle Platform whilst approaching the merging point of the junction. The received information was then combined with the onboard perception to improve the overall understanding of the environment and was visualised in real-time via a bird’s eye view map of the junction, allowing the passengers to observe road traffic objects along the M40, which were not otherwise visible due to occlusions.”
Furthermore, WMG and Jaguar Land Rover researchers jointly developed intelligent trajectory-planning algorithms, which utilised the combined perception to design a high-speed merging manoeuvre that is efficient, smooth, and safe.
Dr Konstantinos Koufos, Senior Research Fellow at WMG, commented: “While the Open Innovation Vehicle Platform was driven by a human driver, the calculated trajectory, including speed and steering, of a hypothetical vehicle using the combined perception was visualised in real-time on the in-vehicle monitors. This allowed the passengers to compare the trajectory of the hypothetical (or ghost) vehicle with the actual trajectory of the human-driven vehicle. Key performance indicators (KPIs) associated with road safety and passenger comfort were also calculated and compared during the merging manoeuvre. The next major step would be to engage the calculated trajectory of the ghost vehicle with the drive-by-wire system of the Open Innovation Vehicle Platform.”
The project successfully implemented and demonstrated the developed technology, collecting, annotating and processing vast datasets including over eight months of road traffic data using 10 infrastructure cameras and three RADARs. These datasets could be made available to selected organisations outside of the AutopleX consortium for user trials and feedback. In addition, it constitutes valuable R&D data that can be used in WMG’s Doctoral Training Centre in Future Mobility Technologies, as well as WMG’s MSc programme in Smart Connected and Automated Vehicles (SCAV).
Learn more about the vehicle used in the demonstration: https://warwick.ac.uk/fac/sci/wmg/research/cav/ivfac/catapult-open-innovation-vehicle/
Explore research in WMG’s Intelligent Vehicles Group: https://warwick.ac.uk/fac/sci/wmg/research/cav/
Innovate UK: https://www.ukri.org/councils/innovate-uk/
Centre for Connected and Autonomous Vehicles: https://www.gov.uk/government/organisations/centre-for-connected-and-autonomous-vehicles
WMG High Value Manufacturing Catapult:
https://hvm.catapult.org.uk/centre/wmg/