Projects and initiatives

Projects & Initiatives
Safe Autonomy Research Group
Our Projects Overview
Get to know more about our research projects on safety management, safe AI, test environments and test scenarios.
Cross-domain Safety Assurance for Automated Transport Systems
The Safe Autonomy Research Group proposed a ground-breaking safety assurance framework that has the potential to be applied across automated transport modes.
In 2022-2023, WMG brought together 38 UK and international organisations in industry, academia, government, and regulation to develop this common safety assurance framework. Nearly 300 key stakeholders across the transport domains of land, sea, and marine, attend and contribute to the development of this report.
The report encourages government policy to tackle similar challenges all three domains face to realise the safe introduction of automated transport systems in a joined-up manner.
The report highlighted that while there are differences between the safety assurance processes of autonomous ships, aircraft, and vehicles, there are also large elements of crossover. This can be leveraged by governments, developers, and manufacturers by aligning safety artefacts across the different types of transport, allowing for greater safety and consumer acceptance.
Please read our report.
Please read about our journey on Cross-domain Safety Assurance.
SYNERGIES: Real and synthetic scenarios generated for the development, training, virtual testing and validation of CCAM systems
- Funding value: €18,636,667.60, funded by EU Horizon (£1,064,591to WMG)
- Partners: BMW (DE), IDIADA, Renault (FR), Stellantis (FR), Toyota Motor Europe (BE), AVL (AT), DLR (DE), TNO (NL), University of Genoa (IT), VICOMTech (ES), Virtual Vehicle Research (AT), VUFO Dresden (DE), and University of Warwick (UK)
Project Context and Challenge:
Connected, Cooperative, and Automated Mobility (CCAM) faces major challenges due to fragmented and non-interoperable scenario databases, lengthy development cycles, and regulatory uncertainty. Current validation methods are inefficient, hindering the safe deployment of automated driving systems. SYNERGIES addresses these challenges by building on previous EU initiatives (HEADSTART and SUNRISE) to deliver a harmonised, federated European Scenario Dataspace, enabling scenario-based testing, safety assurance, and data-driven innovation in CCAM systems.
Objectives:
SYNERGIES aims to accelerate the development, training, and validation of CCAM systems through an interoperable, European-wide Scenario Dataspace and Marketplace. The project will:
1.Federate existing and new scenario databases into a unified, dynamic platform ensuring scalable data access.
2.Extend the range of real and synthetic scenarios, including rural, urban, and edge-case environments.
3.Develop AI-based tools for semi-automatic data processing, annotation, and scenario extraction.
4.Establish governance frameworks and business models to ensure sustainability, security, and standardisation.
5.Facilitate broad stakeholder engagement, from industry to regulators and researchers, to promote adoption and interoperability across Europe.
The overall goal is to provide a trusted, user-centred, and open infrastructure supporting continuous validation and regulatory compliance for CCAM technologies.
Approach and Innovation:
- SYNERGIES adopts a federated, AI-driven, and iterative approach to build a scalable Scenario Dataspace. It integrates lessons from previous EU projects (SUNRISE, Hi-Drive, FAME) and leverages existing scenario sources (Safety Pool™, ADScene, StreetWise, L3Pilot). The project introduces a Federated Layer Architecture to connect distributed databases securely while ensuring ownership sovereignty and interoperability. AI and generative methods will enhance scenario diversity, covering complex, rare, and adverse conditions. Governance models and open APIs will facilitate cross-sector collaboration. The platform’s Marketplace will provide stakeholders with tools for data processing, scenario generation, and testing. By combining semantic technologies, trustworthy AI, and standardisation input (ISO, ASAM, UNECE), SYNERGIES creates an integrated framework for scenario-based validation and certification of CCAM systems.
Impact and Next Steps:
SYNERGIES will accelerate Europe’s transition toward safe, efficient, and sustainable automated mobility by reducing testing costs, shortening development cycles, and enhancing safety assurance. The project will reinforce EU leadership in CCAM technologies, contributing to international standards and UNECE regulations. Its long-term legacy includes a continuously updated European Scenario Dataspace, an active stakeholder network, and a marketplace for data-driven innovation. By fostering interoperability, trust, and data sovereignty, SYNERGIES will lay the foundation for a harmonised European CCAM validation ecosystem and future large-scale deployments.
CERTAIN
- Funding value: € 1.08 million
- Partners:
Applus IDIADA Automotive Technology SA, IDIADA UK Ltd, IDIADA Fahrzeugtechnik GmbH, Universitat Politècnica de Catalunya, BASt, CERTH, DAF Trucks N.V., Emotion3D, ERTICO – ITS Europe, I2CAT Foundation, ICCS, Infineon Technologies AG, Jaguar Land Rover Ltd, Karlsruhe Institute of Technology, University of Leeds, University of Warwick, TNO, Eindhoven University of Technology, Vicomtech, Valeo, ZF Friedrichshafen AG, SWOV, Technische Hochschule Ingolstadt, MAP Transport and Mobility, VAIVE Logistics SL, RWTH Aachen University, SIE-NL.
Project Context and Challenge:
Ensuring the safety, resilience, and societal acceptance of Connected, Cooperative and Automated Mobility (CCAM) systems is one of Europe’s most pressing transport challenges. Traditional validation methods—based on static testing and fixed certification cycles—cannot cope with the dynamic nature of AI-driven systems that evolve through software updates and learning processes. CERTAIN addresses this challenge by developing a continuous, human-centric safety assurance framework for all levels of automation, supporting the safe, trusted, and adaptive deployment of CCAM technologies.
Objectives:
CERTAIN aims to establish a resilient, continuous, and human-centred Safety Assurance Framework (SAF) for CCAM, extending existing methods developed under projects such as HEADSTART and SUNRISE. Its overarching goal is to embed safety, trust, acceptance, and comfort principles into the assurance process, ensuring that ADS and cooperative systems remain safe throughout their lifecycle. Specifically, the project will validate eleven representative sub-use cases spanning SAE Levels 2–4 and multiple environments—urban, highway, and logistics—by combining virtual, proving-ground, and real-world testing. The SAF will integrate trustworthy AI validation, human-machine interaction (HMI) assessment, and in-service monitoring to ensure continuous feedback and improvement. CERTAIN will also deliver harmonised procedures and tools aligned with the UNECE NATM pillars—Audit, Performance Assurance, and ISMR—and will provide guidelines and handbooks that support future regulatory frameworks, consumer assessment programmes, and standardisation efforts across the EU mobility ecosystem.
Approach and Innovation:
CERTAIN adopts a multi-pillar assurance approach consistent with the UNECE New Assessment/Test Method (NATM), building upon the methodological foundation established by SUNRISE. It extends the SAF into a lifecycle-oriented framework where assurance activities continue beyond type-approval through in-service monitoring. The approach integrates scenario-based verification, trustworthy AI evaluation, and user-centred safety metrics for HMI assessment. Technically, the project combines virtual simulation, hardware-in-the-loop, vehicle-in-the-loop, and on-road validation environments within a harmonised toolchain to demonstrate safety across diverse contexts. Innovation arises from linking these domains through continuous data exchange and credibility assessment of models and simulations, ensuring that evidence remains valid and traceable throughout system evolution. CERTAIN also pioneers V2X-based safety validation, lifecycle feedback loops, and trustworthy-AI auditability, enabling regulators and industry to transition from static certification to dynamic, data-driven assurance of CCAM safety.
Impact and Next Steps:
CERTAIN will reinforce Europe’s leadership in safe and trustworthy mobility by delivering a validated, human-centric SAF that bridges research, industry, and regulation. The project’s methods and data assets will shape future EU type-approval procedures, consumer testing (Euro NCAP), and international standardisation (UNECE, ISO, SAE, ASAM). Its long-term impact will include improved interoperability between assurance frameworks, reduced duplication of validation efforts, and enhanced societal acceptance of automation. Looking forward, CERTAIN will extend its framework towards in-service monitoring and digital certification, enabling continuous regulatory oversight and strengthening Europe’s Vision Zero ambitions.
AIGGREGATE: AI-enhanced collective intelligence for resilient, ethical and user-centric awareness and decision making in CCAM applications
- Funding value: €5M, funded by EU Horizon, 500K to WMG
- Partners: Eindhoven University of Technology; Vicomtech; TNO; KU Leuven; RWTH Aachen; IDIADA; CERTH; INFINEON; MAPtm; Continental; PAVE
Project Context and Challenge:
Road safety remains a critical issue in Europe, with over 20,000 fatalities annually. While automated driving offers potential safety, mobility, and efficiency gains, current systems lack the human-like comprehension, predictive capability, and collective decision-making needed in complex, dynamic traffic. Existing CCAM technologies struggle to integrate heterogeneous data, anticipate behaviours, and coordinate ethically across vehicles and infrastructure. Overcoming these limitations requires resilient collective awareness, predictive state modelling, and ethically grounded hybrid intelligence for real-time, human-like decision-making in mixed road environments.
Objectives:
AIGGREGATE aims to transform CCAM from reactive, ego-vehicle approaches to proactive, collective, and socially robust systems. The project’s seven objectives are:
- Develop a user-centric ethical framework enabling human-like control.
- Create resilient collective awareness models fusing multi-source data into enriched Local Dynamic Maps.
- Build predictive state awareness models to anticipate behaviours and system capabilities.
- Design hybrid intelligence algorithms for safe, ethical, and human-like decision-making at both vehicle and mobility system levels.
- Establish a robust safety assurance framework and tools.
- Develop an open-source simulation environment for integration, validation, and assurance.
- Demonstrate the integrated system in complex urban and highway scenarios.
By combining AI, human cognition, and ethical governance, the project will deliver CCAM solutions that enhance safety, trust, and traffic efficiency, supporting the broad adoption of connected and automated mobility in real-world environments.
Approach and Innovation:
AIGGREGATE integrates four pillars: 1) an ethics and human factors framework, 2) resilient collective awareness via early-fusion AI models combining vehicle, infrastructure, and user data, 3) predictive state awareness using AI models enhanced with symbolic reasoning and V2X data, and 4) hybrid intelligence for collaborative decision-making. The approach shifts from ego-centric to collective, real-time understanding, enabling vehicles to negotiate manoeuvres, prevent gridlocks, and operate safely beyond current Operational Design Domains. Novel elements include semantic Local Dynamic Maps, capability prediction modules, and ethically embedded decision algorithms. Development will follow an iterative alpha–beta cycle, validated through 2,000+ simulated scenarios and physical demonstrations with multiple OEM vehicles. The open-source simulation environment and safety assurance toolkit will set new standards for testing and validation, supporting transparency, interoperability, and industry uptake.
Impact and Next Steps:
AIGGREGATE will advance CCAM safety, efficiency, and societal acceptance through resilient, ethical, and human-like automated driving capabilities. Its innovations, i.e., open simulation tools, safety assurance frameworks, and interoperable decision-making algorithms, will provide lasting resources for researchers, OEMs, and regulators. Demonstrations in complex real-world settings will prove feasibility and build public trust. Long-term, the project’s methods will enable wider deployment of CCAM, integration with traffic management systems, and adaptability to future mobility services. By embedding ethical principles and inclusivity from the outset, AIGGREGATE will guide the responsible evolution of AI-driven mobility well beyond the project’s lifecycle.
Harnessing Synthetic Data Fidelity for Assured Perception of Autonomous Vehicles
- Funding value: £500,000
- Funder: UK EPSRC
- Partners: Denso, Siemens, Adelard (part of NCC group), Wayve UK, Chalmers University of Technology, University of Liverpool, City St George University of London
Project Context and Challenge:
As autonomous vehicles (AVs) move from controlled environments to public roads, safety assurance becomes paramount. Scenario-based testing using synthetic data is central to evaluating AV perception, but there is no standardised method for quantifying synthetic data fidelity. Current approaches focus on realism rather than how machine learning models process and respond to simulated inputs. This gap undermines trust in virtual testing. The project tackles this by defining, quantifying, and using fidelity to improve verification and assurance of AV perception systems.
Objectives:
The project’s primary aim is to integrate fidelity-aware methodologies into the safety assurance of AV perception. Four key objectives guide the work:
1.Fidelity Specification – Define a spectrum of fidelity concepts and associated metrics tailored to AV perception models.
2.Fidelity Quantification – Develop a Safe AI toolchain to train robust predictors that estimate fidelity scores for synthetic data points, calibrated via real-world counterparts.
3.Fidelity-Aware Verification – Enhance debug and acceptance testing by incorporating fidelity metrics, enabling more targeted bug detection and reliability assessment.
4.Validation & Communication – Conduct case studies with industrial partners to validate the methods and create assurance case templates linking fidelity-aware evidence to safety claims.
By aligning fidelity assessment with machine learning behaviour rather than generic realism, the project aims to establish rigorous, practical frameworks for using synthetic data in AV verification and validation, supporting regulatory and industrial adoption.
Approach and Innovation:
The project introduces a novel fidelity-aware safety assurance framework for AV perception. First, it formalises multiple fidelity definitions—covering ML outputs, learned features, and explainability profiles—paired with corresponding metrics. These feed into a fidelity quantification pipeline using Safe AI methods, including adversarial training, robustness testing, uncertainty quantification, and GAN-inspired simulator calibration. The fidelity scores are then integrated into two verification streams: debug testing (prioritising high-fidelity synthetic seeds for bug discovery) and acceptance testing (modelling the statistical impact of fidelity on reliability claims). The approach is validated through case studies using industrial-grade simulators, generative AI models, public datasets, and the SafetyPool™ scenario database. Assurance case templates are developed to communicate results within regulatory frameworks. This is the first comprehensive methodology to operationalise fidelity-aware synthetic data in AV testing, shifting from visual realism toward ML-behavioural alignment, thus bridging simulation and real-world safety evidence.
Impact and Next Steps:
The project will deliver the first standardised fidelity specification, quantification tools, and assurance frameworks for synthetic data in AV perception testing. Its outputs—open-source predictors, verification methods, and safety case templates—will directly benefit industry partners and feed into UK AV safety standards, supporting CAVPASS and related initiatives. By enabling safer, faster, and more cost-effective AV development, the work accelerates deployment while strengthening public trust. Beyond AVs, the fidelity-aware methodology can be adapted to other domains reliant on virtual testing, such as robotics, aerospace, and nuclear systems, establishing a cross-domain benchmark for trustworthy synthetic data use in safety-critical AI applications.
DROIDS project
- Funder: Conference of European Directors of Roads
DROIDS stands for Digital Road Operator Information and Data Strategy. This project focuses on providing the National Road Authorities (NRAs) with increased knowledge and support to reap optimal benefits from digitalisation as they evolve to become digital road operators operating the physical, operational, and digital road infrastructures. Topics explored included the identification of the data requirements for digital twin applications and how to incorporate the element of trust within a system.
ReliablE in-Vehicle pErception and decisioN-making in complex environmenTal conditions (EVENTS)
- Funding value: Total €6M+, Value to WMG €650k
- Partners: I-SENSE Research Group, of the Institute of Communication and Computer Systems (ICCS), Institute of Measurement, Control and Microtechnology at Ulm University (UULM), SEAbility, Tecnalia, Perciv AI, HITACHI France, APTIV, HITACHI UK, STELLANTIS, TU Delft
Project Context and Challenge:
Driving is a challenging task that involves complex situations that need to be handled safely and efficiently. The same is valid for Connected and Automated Vehicles (CAVs), which also need to handle these situations, to a certain extent, depending on their automation level and their target Operational Design Domain (ODD). The higher the automation level is, the higher the (user) expectations for the system to cope with these situations are. In the context of this project, these complex situations where the normal operation of the CAV is close to being disrupted (e.g. when the ODD limit is reached due to traffic changes, harsh weather or light conditions, unstructured roads, imperfect data, sensor or communication failures, etc.), are called "events." Within the scope of this project, these events are clustered under three main use cases:
• Interaction with VRUs (vulnerable road users) in Complex Urban Environments
• Non-standard and Unstructured Road Conditions
• Low Visibility and Adverse Weather Conditions
Project Objectives:
The vision of EVENTS is to create a robust and resilient perception and decision-making system for CAVs to manage various types of “events”. EVENTS will allow overcoming the current CAV ODD limitations due to the dynamically changing road environment (VRUs, obstacles) and/or imperfect data (e.g., sensor and communication failures) while ensuring continuous and safe operation. In EVENTS, if the system or some of the subsystems cannot perform with the expected quality and reliability, an improved minimum risk manoeuvre is triggered.
Approach and Innovation:
WMG has been heavily involved in the Vehicle System Hazard Analysis & Risk Assessment (HARA) through the application of System Theoretic Process Analysis (STPA) for Safety of the Intended Functionality (SOTIF) and the development of self-assessment for Perception & Localisation systems of this project. We have also been leading the Standardisation & International Liaison activities(ISO TC 204 WG14 (Guidance on ODD), ISO TC22 SC32 Working Groups 13 & 14, ASAM: OpenODD (Project Lead), ASAM: OSI performance (Work Package Lead), BSI: PAS 1883 (Technical Lead) and BSI: Flex 1889 (Technical Lead)).
Impacts and Next Steps:
EVENTS will improve technological advances in perception and decision-making for real-time CAV operation, paving the way for safe deployment of CAVs. The purpose of the Standardisation & International Liaison task is to centrally coordinate all inputs arising from EVENTS across various standardisation bodies and organisations. Since international collaboration is essential for the safe deployment of automated driving, this task will also ensure alignment at both European and global levels. This includes maintaining liaisons with research initiatives, policymakers, organisations, associations, technical communities, and networks in regions such as Europe, the USA, Japan, South Korea, China, and Canada.
GB Autonomous Vehicle Approval Scheme
- Funder: Vehicle Certification Agency
The “GB Autonomous Vehicle Approval Scheme” represents a pivotal initiative driven by the Vehicle Certification Agency (VCA) to enhance the safety and security of Automated Driving Systems (ADS). As the landscape of autonomous mobility evolves, ensuring robust certification processes becomes paramount. This project builds upon the groundwork laid by the Department for Transport’s International Vehicle Standards (IVS) Division, specifically focusing on Work Package 3 (WP3): Scenario Generation, Selection, and Coverage.
The rapid evolution of Automated Driving Systems (ADS) demands robust safety assurance. Rooted in assessing the Operational Design Domain (ODD), the proposed methodology offers a generic framework applicable to ALKS and other ADS types. The project focuses on dual aspects: auditing management systems to ensure credible processes and assessing system performance. Additionally, it lays the groundwork for upskilling VCA engineers, enabling effective application of the ODD assurance framework. Beyond the UK, this initiative contributes to international ADS safety standards.
The project involves three work items. The first two focus on Management System Auditing and Performance Assessment. They involve comprehensive research and the creation of training materials for the Vehicle Certification Agency (VCA) engineers. The training will provide foundational knowledge needed before any Type Approval specific training, which would be part of a potential second phase of the project. The third work item will demonstrate how our flexible and scalable Operational Design Domain (ODD) based assurance framework can be applied to various use cases. This will also provide foundational training material on how the framework can be implemented.
A key component of our project is the development of scenarios, which are virtual ‘what if’ situations that the ADS might face. These scenarios are stored in WMG’s online Safety PoolTM Scenario Database, which currently hosts over a quarter million scenarios.
Our team, consists of experts from various fields including ADS verification and validation, project management, scenario generation, scenario simulation, systems and safety engineering, software architecture, and human factors. The project aligns with the high-level milestones requested by the Department for Transport (DfT) and VCA. The outcomes of this project will not only provide great value for VCA but also contribute to the safety assurance of ADS internationally.
i4Driving
- Funder: European Union
- Partners: Panteia BV, University of Naples Federico II, Aimsun, Delft University of Technology, Swedish National Road and Transport Research Institute, Automotive Technology Centre of Galicia, ZF Friedrichshafen AG, SwissRE, RDW, Technical University of Munich, University of Aschaffenburg, National Research Council, DENSO
The i4Driving project represents a pioneering initiative aimed at revolutionising the safety assessment of automated driving systems (ADS) within Cooperative, Connected, and Automated Mobility (CCAM) solutions. By establishing a robust human road safety baseline for virtual assessments, i4Driving seeks to address the challenges posed by the integration of automated vehicles into heterogeneous traffic environments. At its core, i4Driving embodies two central concepts: the development of a multi-level, modular simulation library integrating existing and novel human driving behaviour models, and the introduction of an innovative methodology to address the significant uncertainty inherent in human behaviours and use case circumstances. This collaborative endeavour draws upon expertise across various disciplines, including traffic engineering, human factors, data science, and computer science.
The i4Driving methodology employs an agnostic approach to modelling, utilising a combination of data mining and advanced cross-disciplinary techniques to guide the development of the simulation library. Through iterative cycles of model development, calibration, and validation, the project aims to strike a balance between model complexity and error, ensuring the plausibility and credibility of the developed models. A key innovation of the i4Driving project lies in augmenting existing human driver models with a 4D cognitive layer, drawing from diverse disciplines such as Human Factors, Road Safety, Traffic Flow Theory, Psychology, Artificial Intelligence, Statistics, Mathematics, and Social Science and Humanities. Sensitivity auditing and techniques for global uncertainty and sensitivity analyses drive the comparison of different modelling assumptions and formulations.
The project's methodology encompasses both inner and outer model development processes, utilising existing datasets and experimental data collected from driving simulator facilities within the consortium. Techniques for standardising experiments and encoding the heterogeneity of driving behaviours further enhance the credibility and applicability of the developed models. Through interdisciplinary collaboration and innovative methodologies, i4Driving aims to accelerate the adoption of CCAM technologies while ensuring the safety and reliability of automated driving systems, paving the way for a safer and more efficient future of transportation.

Midlands Future Mobility
- Funder: Jointly funded by the Centre for Connected and Autonomous Vehicles and the industrial partners
- Partners: Amey Consulting, AVL, Costain, Coventry University, Immense, MIRA, National Highways, Transport for West Midlands, Vodafone, Wireless Infrastructure Group
Over 7000 people die on our roads each year with countless more injured. Transport is now the number one emitter of carbon. Thousands of people rely on public transport every day and those users of public transport are disproportionately represented by lower social economic groups.
The advent of new technologies offers the potential to address these challenges, but with this comes new challenges such as assuring safety, providing an enabling standards and regulation environment and ensuring that users both trust and want these new technologies.
Midlands Future Mobility (MFM) is an initiative that brings together technology, people and policy to enable the development, deployment and scalability of transport technology.

Our vision is to achieve zero road-incidents, net-zero emissions and inclusive transport in the West Midlands.
Our mission is to create knowledge, methodologies and tools for every stakeholder in transport to enable this vision.
The West Midlands is at the heart of the UK’s Automotive industry, manufacturing industry, transport industry and has a leading local authority, Transport for West Midlands, in transport innovation. Lead by WMG, who bring world leading research innovation, our partners span research, connectivity, infrastructure, local authorities, road operators and vehicle testing. Together we have created a backbone of enabling technology across the West Midlands – including enabling testing infrastructure in campus and road environments, safety assurance methodologies for CAM, a range of connectivity solutions (including Small Cells, 5G, DSRC-units), research and lab capability, data, and modular testing vehicles. Through active projects and use cases we are addressing the challenges of integration to the existing mobility system, setting a blueprint for the UK’s future mobility path.

The UK’s world-leading testing facilities
Midlands Future Mobility is part of CAM Testbed UK, six core facilities within a three-hour drive offering a comprehensive set of capabilities for the testing and development of connected and automated mobility (CAM) technologies. Funded by the Centre for Connected and Autonomous Vehicles and coordinated by Zenzic, CAM Testbed UK is able to offer interoperability to customers that is unrivalled worldwide.

To learn more about us, please visit https://midlandsfuturemobility.co.uk/.
PAVE United Kingdom
- Founders: WMG, The University of Warwick, the Department for Business and Trade, the Department for Transport, the Centre for Connected and Autonomous Vehicles (CCAV), and Transport for West Midlands.
Partners for Automated Vehicle Education United Kingdom (PAVE UK) is a nongovernmental and non-profit membership organisation created on behalf of the UK’s Centre for Connected & Autonomous Vehicles (CCAV) by WMG at the University of Warwick.
The PAVE UK initiative aims to build public confidence in self-driving technology through a programme of education and engagement, supporting the UK Government’s ambition to safely deploy self-driving vehicles on the road and its aim to make the UK the leader in artificial intelligence (AI).
PAVE UK is the country’s first non-governmental organisation that advocates for and delivers public education and engagement programmes on automated vehicles. Our vision is to enable public trust and acceptance of self-driving technology through accurate and inclusive awareness and education programmes.
Our missions are:
Learn: Using scientific rigour, we identify and understand different personas and their behaviours in our society. Identify suitable types of content and communication mechanisms based on scientific literature.
Communicate: Physical and digital educational content will be customised for different groups in society to gradually build up their understanding of selfdriving technology, from a generic introduction to its benefits and communicating safety.
Engage: Organise interactive and hands-on activities for the public to engage with self-driving vehicle technology to help build societal trust and acceptance in this new transport innovation.
Click here to read our brochure.
Safety Pool™ Scenario Database
- Founders: WMG, The University of Warwick and Deepen AI
Context and Challenge:
The safe deployment of Connected, Cooperative, and Automated Mobility (CCAM) systems depends on robust, scalable, and standardised scenario-based testing. However, fragmented tools, limited interoperability, and inconsistent standards hinder effective safety assurance and regulatory adoption. The UK Department for Transport’s (DfT) “Safety Pool™ Scenario Database” project addresses these challenges by advancing the world’s largest open scenario repository. Building on WMG’s expertise, it enables trusted, transparent, and efficient scenario creation, enrichment, and validation for automated driving systems.
Objectives:
The Safety Pool™ Scenario Database project aims to enhance the UK’s capability in scenario-based testing and safety assurance for CCAM systems. The objectives are to:
1.Develop advanced toolchains for crowdsourced, incident-based, and continuous (24/7) scenario generation.
2.Enrich scenarios through realistic background traffic and Operational Design Domain (ODD) scenery integration.
3.Optimise user experience by enabling trajectory-based design, annotated storylines, and intelligent rating dashboards.
4.Create regulatory and user-defined use cases aligned with UNECE frameworks (e.g., R157 ALKS, R171 DCAS, LSAD).
5.Align scenario tagging with latest standards (ISO 34503, BSI PAS 1883:2025, BSI 1891) and develop ODD validation and search tools.
6.Strengthen interoperability and cybersecurity through improved APIs, cloud integration, and third-party audits.
The overall goal is to establish a comprehensive, standardised, and secure platform supporting scalable safety validation for automated driving technologies.
Approach and Innovation:
The project adopts a modular, AI-assisted, and standards-driven approach across six work packages, covering scenario generation, enrichment, optimisation, ODD alignment, and secure integration. It leverages the Safety Pool™ Studio as a collaborative interface for public and regulatory engagement, democratising scenario creation and validation. Novel toolchains—such as real-time incident reconstruction, complexity scoring, and trajectory conversion, enable automated, traceable, and interoperable workflows. By embedding ISO and ASAM standards (OpenSCENARIO, OpenLABEL, OpenDRIVE), the platform ensures cross-tool compatibility and regulatory readiness. Advanced ODD parsing, semantic tagging, and behaviour taxonomies enhance search precision and traceability. The integration of cybersecurity audits and API extensions further strengthens resilience and accessibility. Collectively, this approach delivers a scalable, user-centred infrastructure aligned with UK and international safety frameworks.
Impact and Next Steps:
The Safety Pool™ Scenario Database will reinforce the UK’s leadership in autonomous vehicle safety assurance, enabling a unified framework for data-driven validation and regulatory collaboration. It will accelerate certification readiness, reduce testing costs, and promote innovation by providing standardised, reusable, and high-fidelity scenarios. The project’s outcomes will feed into global standards (ISO, ASAM, UNECE) and support continuous learning through in-service monitoring. Long-term, the Safety Pool™ ecosystem will serve as the cornerstone of a trusted, interoperable, and sustainable validation infrastructure, empowering policymakers, industry, and researchers to advance CCAM safety and public confidence.
To learn more about Safety Pool™, please visit https://www.safetypool.ai/
Watch our monthly webinar recording on our Youtube channel: https://www.youtube.com/@safetypool227
Scenario, coverage, & Safe AI
- Funder: DENSO
This project is contracted by DENSO to undertake multi-phased research activities on 1) STPA-based scenario generation; 2) ODD-based scenario generation; 3) coverage analysis development; and 4) safe AI.
Based on the system architecture, STPA analysis was carried out using domain experts’ knowledge to explore potential hazards within the system. Furthermore, scenarios were also created using the system’s ODD specification and combined with the system’s behaviour competency. Such created scenarios are hosted within the Safety PoolTM scenario database for testing purposes. A multi-pillar-based coverage analysis technique was also developed as part of the project to evaluate the completeness of the scenario-based testing process. In the last phase, the AI safety topic was explored using the perception module of a system and varying detail levels of the input data.
Scenario development for Automated Driving Systems (ADS) safety validation in Canada
- Funder: Transport Canada
The Canadian driving environment is characterised by diverse landscapes, varying weather conditions, and a mix of urban, suburban, and rural roads. While the field of Automated Driving Systems (ADS) represents a paradigm shift in transportation, promising increased safety, efficiency, and convenience, the complexities inherent in these environments introduce novel challenges. This project focuses on developing a meticulously tailored scenario-based testing framework that reflects the diverse and distinctive Canadian driving context.
Scenarios, which encapsulate the scenery and environmental conditions and behaviour of road actors serve as the cornerstone for evaluating the functional correctness and safety of ADS. This project delves into the intricacies of scenario-based testing, scenario creation, and their application in the Canadian context. The work produces a catalogue of essential scenarios for testing in Canada. These scenarios, developed using our innovative data-based and knowledge-based scenario creation methods, form a comprehensive library that is available on the online Safety Pool™ scenario database. This library is not merely a collection of scenarios; it is a carefully curated resource that takes into account data and knowledge from various sources.
The development of this library involved a meticulous process of gathering and analysing data from diverse sources. This includes accident data from Canada’s national collision database, knowledge from consumer testing, such as EuroNCAP, and other standards, such as ALKS and LSAD. Furthermore, the library incorporates scenarios created to target testing against Canadian rules of the road, ensuring that the scenarios are as realistic and comprehensive as possible.
This project, therefore, provides a robust foundation for the safety assurance of ADS in Canada. It offers valuable insights and resources for researchers, car manufacturers, and other stakeholders in the field of autonomous driving. We also provide guidance to build and extend the scenario libraries, ensuring that our work continues to contribute to the safety assurance of ADSs in Canada and beyond.
SUNRISE
- Funder: European Union
- Partners: TNO, Siemens, ERTICO, TOYOTA, VEDECOM, Renault, Continental, Vicomtech, CVC, IDIADA, Chalmers, RISE, bast, IKA, Deepen, Infineon, AVL, Virtual Vehicle, Universita Di Trento, ICCS
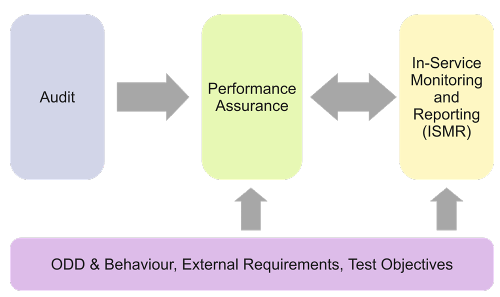
SUNRISE stands for Safety Assurance Framework for Connected and Automated Mobility Systems. The main goal of this project is to develop a harmonised and scalable CCAM Safety Assurance Framework that fulfils the needs of different automotive stakeholders. CCAM stands for Cooperative, Connected and Automated Mobility. This safety assurance framework plays a key role in the project. As shown in the figure below, different stakeholders each have their own specific interest in this safety assurance framework. For example, developers of CCAM systems, but also the entities that certify these systems or that perform research in this field, and even citizens, might have their own specific interest in this safety assurance framework.

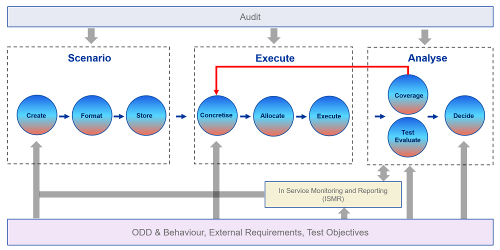
At a high level, there are three main components of the safety assurance framework: audit, in-service monitoring and reporting (or ISMR), and performance assurance. Performance assurance focuses on ensuring that the system can perform as intended within its defined Operational Design Domain (ODD), which can be visualised as a set of operating conditions within which the system is designed to operate safely. The audit focuses on ensuring the development process, the tools used, and the management system are adequate. The ISMR focuses on capturing and recording any additional information during the system's deployment for consideration in the system’s future design. All components are part of the safety assurance framework; however, in SUNRISE, we focus on performance assurance using a scenario-based approach and incorporate a virtual environment. Please note that we also have the input layer to the safety assurance framework, which includes the requirements containing ODD and behaviour, as well as other external requirements and test objectives.
The performance assurance workflow comprises three main blocks: scenario, execution, and analysis.
- Scenario Block: This involves creating, formatting, and storing scenarios. Scenarios can be created using knowledge-based (expert insights) or data-based (e.g., UK STATS 19 dataset) approaches. Scenarios are formatted for different stakeholders using common formats like the ASAM OpenSCENARIO/OpenDRIVE and BSI Flex 1889 and stored in a database such as the Safety PoolTM Scenario database.
- Execution Block: Concrete scenarios are obtained and ready for execution, combined with test objectives, and allocated to various testing environments. The framework supports virtual, simulated, and real-world testing environments.
- Analyse Block: Includes coverage analysis and test evaluation. Coverage analysis assesses scenario coverage from multiple perspectives and explores the scenario parameter spaces iteratively to identify failures. Test evaluation checks if individual tests meet criteria like speed limits and collision avoidance. The combined analysis results determine the system's overall safety assurance.
STPA-based Safety Analysis of eVTOL Operations
- Funding value: £140k
- Partners: UK Civil Aviation Authority, Vertical Aerospace, Skyports, Lilium Aerospace, European Helicopter Association, NATS, Bristow Group, and FlexJet
Project Context and Challenge:
The rapid advancement of Advanced Air Mobility (AAM) concepts and electric Vertical Take-off and Landing (eVTOL) operations introduces distinct challenges for safely integrating eVTOL aircraft into the current airspace. These challenges arise from the technology’s novelty, operational complexity, and ongoing regulatory uncertainties. They affect a wide range of stakeholders—spanning from manufacturers, who must address design and airworthiness, to vertiport and aerodrome operators responsible for infrastructure and operations, and ultimately to passengers and the general public. The UK’s Airspace Modernisation Strategy emphasises integration rather than segregation of different airspace users, each with varying needs and capabilities. However, incorporating new technologies such as eVTOL into existing air navigation systems creates emerging risks and hazards that must be identified and carefully evaluated.
Objectives:
This research funded by the Department for Transport (DfT), proactively identified risks that may arise from the future integration of eVTOLs into an already complex airspace system. The STPA for eVTOL project aimed to identify the unsafe interactions between various stakeholders as part of the integration of eVTOL aircraft into the existing airspace, using a systems-thinking based approach - System-Theoretic Process Analysis (STPA). It was led by the Risk Sub-group of the eVTOL Safety Leadership Group(eVSLG) and involved engagement with stakeholders across the entire aviation sector- the Regulator (UK CAA), Operators (Flexjet, Bristow Group), Air Traffic Control Provider (NATS), Vertiport providers (Skyports), and OEMs (Lilium, Joby). The project aimed to capture gaps in existing regulations to be developed into safety recommendations to mitigate emergent risks.
Approach and Innovation:
Due to the complexity of the project and the large volume of results, a priortisation concept, based on an extension to the standard STPA Methodology, was developed by WMG to prioritise the results to make it manageable and focus on the most critical aspects, to improve System safety. The STPA results identified several gaps in the current aviation policies, procedures, and regulations. These were linked to interactions between the various stakeholders both before the start of the flight operations (organisational) as well as during the actual flight operations (operational).
Impact and Next Steps:
This work identified 50+ gaps in regulations, including airspace integration, vertiport operations, and automation. The outcome is a Civil Aviation Publication (CAP)- CAP 3141 CAP3141: STPA-based Safety Analysis of eVTOL Operations | UK Civil Aviation Authoritywith recommendations for policy updates, operational instructions, and practical guidance to prevent or mitigate the emerging risks with the introduction of eVTOLs, particularly at scale.This work supports the creation of regulatory frameworks that enable the safe integration of emerging aviation technologies like eVTOL aircraft. As the next step, the CAA and the wider eVTOL industry will need to consider the implementation of these safety recommendations to ensure safe eVTOL deployment.
DORA: Developing Objective and quantifiable Risk Assessment for CAV (DORA)
- Funder: Innovate UK
- Partners: IDIADA AUTOMOTIVE TECHNOLOGY UK LTD
Project Context and Challenge:
There is an urgent need for objective, quantifiable measures to assess Autonomous Vehicle (AV) safety and performance, a critical step towards accelerating Connected and Automated Mobility (CAM) adoption in the UK. Current AV development and regulation lack clear methods to translate the subjective notion of a “careful and competent driver” into measurable criteria. DORA addresses this gap by aligning human driving standards with AV capabilities and introducing methodologies to quantify risk in complex, dynamic environments.
Objectives:
The DORA project aims to advance Connected and Autonomous Vehicle (CAV) validation and support the AV industry by delivering three key outcomes: a framework that quantifies AV driving behaviour, a robust testing methodology and recommendations for updating AV standards and regulations. Central to this is the creation of a novel framework that bridges human driving standards with AV capabilities, ensuring that the subjective notion of a “careful and competent driver” is translated into objective, measurable criteria. DORA will develop methodologies to quantify risk in complex, dynamic environments and establish clear stopping criteria for AV testing. These outputs will provide universally applicable benchmarks for AV validation and certification while informing future regulation and insurance models. By aligning with both established industry practices and emerging standards, DORA offers a holistic, evidence-based approach to safety assurance, supporting the safe and accelerated adoption of autonomous mobility in the UK.
Approach and Innovation:
The novel framework within DORA translates the concept of a "careful and competent driver" into quantifiable metrics for AVs. This involves analysing human driving data to extract key performance indicators, adapting these indicators for AV capabilities, and validating them within a robust simulation environment. The framework improves upon existing safety standards by providing specific, measurable criteria directly linked to human driving performance, addressing a major gap in current approaches. By applying established technologies such as data analytics and simulation to the new domain of AV risk assessment, while simultaneously developing novel methodologies for quantifying risk in complex, dynamic driving environments, the DORA approach ensures both innovation and practicality. The outputs directly address the need for clear, objective criteria in AV safety assessment and provide tangible tools for AV developers, regulators, and testing organisations to evaluate and improve AV performance. In doing so, DORA advances safety assurance and builds confidence for the safe deployment of autonomous mobility.
Impact and Next Steps:
DORA aligns with several Government priorities that include the UK's goal to be a world leader in CAM technologies which is championed through CCAV, the "Build Back Better" plan by fostering innovation and high-skilled job creation, and helping to reduce regional economic disparities by distributing high-tech job opportunities. By strengthening AV safety assurance processes, DORA will accelerate AV adoption, improving mobility and independence for an estimated 1–2 million UK residents. Its outcomes will inform and shape future AV regulation, supporting the UK’s desire to be a leader in road safety initiatives and potentially reducing road accidents by 20–30% through improved AV standards.

20+
Research projects

£15M+
Research funding

100+
International partners

10+
International and national standards and regulations
Initiatives Overview

Safety Pool™ Scenario Database
Safety Pool™ Scenario Database is the world’s largest public library, with more than 270,000 scenarios for Automated Driving Systems (ADS) testing, validation, and certification.
Founded and managed by WMG, University of Warwick, Safety Pool envisions that the safety of every ADS can be transparently tested, validated, and certified through common processes and infrastructures shared across industry, researchers, academia, and policymakers internationally.
With over 150 organisations signed up, Safety Pool™ will be used by regulators in the UK for type approval of Automated Driving Systems in the UK. It also leads the research and fosters the development of common description languages, standards, and mediums that allow for a meaningful exchange of technical information and artefacts across different stakeholders worldwide.

PAVE United Kingdom
Founded by the Department for Transport, the Department for Business and Trade, the Centre for Connected and Autonomous Vehicles (CCAV), Transport for West Midlands and WMG, University of Warwick, PAVE UK is the first national initiative that aims to build public confidence in self-driving technology through a public awareness and education programme.
Since our launch in February 2024, we have introduced self-driving technology to more than 5000 public members and their families across the UK.

Why work with us
As a fast-growing research group, we are driven by bringing positive impacts to real-world safety challenges and improving future mobility.
Underpinned by scientific evidence, our research helps you put the users at the heart of your technology developments and deploy innovations in the real world at the highest safety standards.