Test Environment

Test Environment
Safe Autonomy
Overview
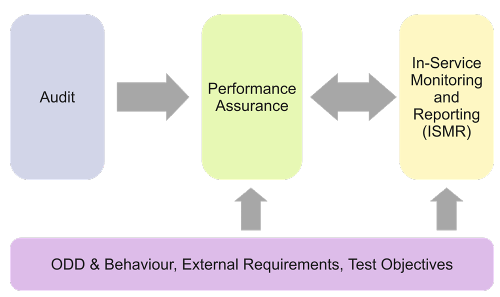
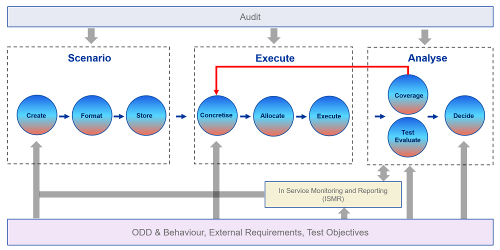
To perform the execution of the scenarios, we need an execution environment, which can range all the way from pure virtual to real-world public roads.
The virtual environment enjoys scalability and controllability, whereas the real world offers the exact realism one would encounter during the actual usage of the system. In the Safe Autonomy Research Group, we focus on answering: 1) how to incorporate different levels of environment for safety assurance; 2) which environment to use based on given objectives; 3) how to consolidate safety evidence across environments; and 4) how to validate the credibility of virtual environments.
Through our research and development outcomes, we have also led the development of several simulation-related international standardisation initiatives. Our goal is to become the go-to place (both nationally and internationally) for simulation-based testing of CAVs.
Research
Our 3xD Simulator is one of the world's most adaptable and advanced driving simulators.
It has the capability to replicate complex driving scenarios, changing lighting conditions, communications interference or unexpected events, all in a safe and repeatable environment.
Test environment projects
Learn more about our key research projects on test environment.
DriveSafeAI
- Funding value: £1.8 millions
- Partner: Wayve
Project overview:
The project DriveSafeAI is part of CCAV’s Commercialising CAM Supply Chain Competition (CCAMSC). The Commercialising CAM programme is funded by the Centre for Connected and Automated Vehicles, a joint unit between the Department for Business and Trade (DBT) and the Department for Transport (DfT), and delivered in partnership with Innovate UK and Zenzic.
The project brings together Wayve’s expertise in developing end-to-end machine learning for self-driving with WMG’s world-leading expertise in verifying and validating the safety of self-driving technologies. The project will develop a set of safety methods, tools, and datasets for self-driving vehicles and create the evidence to underpin future AI regulation and policy. An Independent Advisory Committee will provide feedback on the approach.
Project Outcomes & Impacts:
The project aims to create a set of safety methods, tools, and datasets to ensure the safe deployment of AI software used in self-driving technology, paving the way for the commercial deployment of AV technology.
This includes the evidence base for an AI safety assurance framework that is scalable to different Operational Design Domains (ODDs). Pioneering the novel OASISS (ODD-based AI Safety In Self-Driving Systems) approach, these methods can be easily adapted to new ODDs, ensuring straightforward verification and validation of AI-based software across different regions and deployment geographies. The innovations will benefit the entire self-driving industry and apply to all system architectures that use AI, either in discrete components or fully end-to-end.
Impact and Next Steps:
DriveSafeAI’s outputs will also help to shape emerging regulatory and standardisation frameworks at national and international levels by working closely with regulators and the UK Government through the CAVPASS programme to develop best practice and guidance on AI system safety validation.

What we can offer
Underpinned by scientific evidence, our research helps you put the users at the heart of your technology developments and deploy innovations in the real world at the highest safety standards.
 (1).jpg)