
Details of the Motion of a Foucault Pendulum
A PDF version of this page is available here.
Introduction
This experiment tells us that the Earth's surface is not an inertial frame of reference, that is a frame which is either at rest or moving with a constant velocity in a particular direction, with no external forces applied. In rotating frames of reference, such as on the surface of the Earth, the velocity of the frame is constantly changing direction. It is this that, in the case of the pendulum, causes it to appear as though angular momentum is not conserved and Newton's laws are not obeyed. As observed from a position at rest in space (an inertial frame) however, one would see that angular momentum is in fact conserved and Newton's laws are obeyed.
One may expect that the best way to treat this problem would be to analyse the mechanics from an inertial frame of reference. In actual fact it is somewhat less complicated to instead use a non-inertial rotating frame fixed to the Earth's surface. In order to do this, we must find a way of translating from the inertial to the non-inertial frames and care must be taken when considering vectors, in particular their time derivatives, as will become apparent.
When considering mechanics in non-inertial frames, additional forces must be considered which vanish in inertial frames. For this reason these forces are termed fictitious forces and those which we concern ourselves with here are the centrifugal and Coriolis forces. The details of the centrifugal force are not essential in understanding why the plane of oscillation rotates, however its effects are interesting and the description emerges naturally from the mathematics which follows this introduction.
Rotating Frames
In a body rotating with angular velocity , a particular point with position vector
has a velocity
given by
| |
(1) | |
In fact for any vector (not necessarily a position vector) fixed in a rotating body,
| |
(2) | |
Thus for unit vectors ,
and
, directed along the
(east),
(north) and
(upwards) axes fixed on the Earth's surface (see figure 1), we have
| |
(3) | |
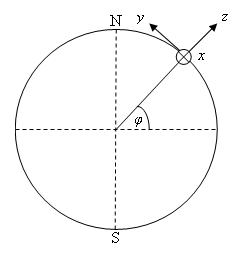 Figure 1: The directions of the
Figure 1: The directions of the ,
and
axes for a point on the Earth's surface with latitude
.
Now consider the position vector of a particle in this coordinate system,
| |
(4) |
|
Note that the origin of the coordinate system here (where ) is at the centre of the Earth. The rate of change of this vector will be measured differently by an observer in an inertial frame, as compared to an observer standing on the Earth's surface. We shall use
to denote the rate of change of
as measured by the inertial observer and
and
to denote the rate of change of
as measured by the non-inertial observer on the Earth's surface. The rates of change of scalar quantities, i.e. the derivatives of
,
and
, will always be measured to be the same by both observers. According to the non-inertial observer on the Earth's surface, the directions of the unit vectors are constant in time, so
| |
(5) | |
For the inertial observer, however, the directions of the unit vectors are varying in time, so we have
| |
(6) | |
from equations 3 and 4. Applying the same formula, the rate of change of as measured by the inertial observer is
| |
(7) | |
where is the rate of change of
as measured by the non-inertial observer. From equation 6,
| |
||
Hence,
| |
(8) |
|
Newton's second law for a particle moving under the influence of gravity plus an additional force F is
| |
(9) |
|
where we must consider the absolute acceleration , since equation 9 holds only in inertial frames. (If one were to use
in place of
then equation 9 would not be valid).
is a vector pointing towards the centre of the Earth, with a magnitude equal to
(
). Substituting equation 8 into 9 and rearranging, we obtain
| |
(10) | |
Equation 10 is the equation of motion for a particle in a non-inertial rotating frame. The third and fourth terms on the right hand side are the Coriolis and centrifugal forces respectively. The fifth term is the Euler force, which can be neglected since, for the Earth, .
The Centrifugal Force
Let us delay our discussion of the Coriolis force and first focus on the centrifugal force. This is a position dependent force, whereas the Coriolis force is velocity dependent, which means that when any measurement is taken of the acceleration due to gravity, what is actually measured is the effective acceleration due to gravity,
| |
(11) | |
As one may expect, the direction of is perpendicular to the axis of rotation of the Earth and directed outwards, thus it has components in the
and
directions. For a point with latitude
,
| |
(12) |
|
Thus the and
components of
are
| |
(13) | |
| |
(14) |
|
and the effect of the centrifugal force is to decrease the magnitude of the acceleration due to gravity and to alter its direction slightly; in the northern hemisphere a plumb line is deflected to the south and in the southern hemisphere it is deflected to the north.
At the equator (), the
component vanishes and the
component has its maximum value, whereas at the poles (
), both components vanish. Thus the acceleration due to gravity will be measured to be less at the equator than at the poles. This is compounded by the fact that the radius of the Earth is less at the poles than at the equator, which incidentally is due to the centrifugal force. The overall effect is that one weighs less at the equator than at the poles, although for those readers interested in weight loss, there are simpler and more cost-effective methods.
The Coriolis Force
Before delving into the mathematics of the Coriolis force it is beneficial to attempt to visualise its effect. Neglecting friction, consider a disk rotating anticlockwise with a particle being fired across the diameter. Standing stationary (an inertial frame) and watching the disk rotate in front of you, if you were to roll a ball across the diameter of the disk, you would see the ball travel in a straight line through the centre of the disk. If you were rotating with the disk (a non-inertial frame) however, and rolled the ball towards the centre in the same manner, you would see the particle being deflected to your right as if subject to a force acting perpendicular to the particle's velocity. This force is the Coriolis force and a good visual supplement to this description is located here![]() . We turn our attention back to the Earth now and imagine standing still at the North Pole. Neglecting air resistance, a bird flying south would appear to be following a slightly curved trajectory to the west, whereas an observer watching from at rest in space would see the bird flying in a straight line while the Earth rotates underneath.
. We turn our attention back to the Earth now and imagine standing still at the North Pole. Neglecting air resistance, a bird flying south would appear to be following a slightly curved trajectory to the west, whereas an observer watching from at rest in space would see the bird flying in a straight line while the Earth rotates underneath.
With our pendulum, we assume that the distance through which the bob moves is small enough that the gravitational and centrifugal forces can be treated as constant and we combine them together into a constant effective acceleration due to gravity, . From equation 10, the equation of motion now becomes
| |
(15) |
|
In our coordinate system with the unit vectors ,
and
, pointing east, north and upwards respectively, the angular velocity of a point on the Earth's surface with latitude
is
| |
(16) | |
Hence we obtain for the Coriolis force
| |
(17) |
|
We concern ourselves primarily with the horizontal motion in the plane. The vertical component of the Coriolis force is negligible since it provides a small correction to
, with the sign alternating on each half-period. Assuming that the length
of the pendulum is large and that the amplitude of the oscillations is comparatively small, the velocity in the
-direction can be neglected (
) and we can utilise the small angle approximation (
) for the angle the pendulum makes with the vertical (its rest position). Thus from equations 15 and 17, assuming there are no additional external forces (
), we obtain the equations of motion for the pendulum in the
and
directions,
| |
(18) |
|
| |
(19) | |
The first terms on the right hand sides are the familiar restoring forces for a pendulum exhibiting simple harmonic motion, and the second terms are the contributions from the Coriolis force. In order to obtain an explicit solution to these equations, we can multiply equation 19 by the imaginary unit , and add it to equation 18, giving
| |
(20) | |
where and
is the natural angular frequency of the oscillations, i.e. the frequency of simple harmonic oscillations in the absence of the Coriolis force. Equation 20 resembles the equation of motion for a damped pendulum, except for the imaginary "damping" term. We look for solutions to this equation of the form
and substituting this into equation 20 gives
| |
||
| |
(21) |
|
where since since the frequency of the rotation of the Earth is much less than the frequency of oscillation of the pendulum (
). Hence the solution is
| |
(22) | |
The terms in parentheses describe simple harmonic motion with frequency , and
are constants fixed by the initial conditions. We would therefore expect that the prefactor
is the term which will tell us about the rotation of the plane of oscillation. Dropping the SHO terms and taking the real part of
, we obtain
| |
(23) |
|
Defining as the period of rotation of the plane of oscillation, clearly
, so
| |
||
| |
||
| |
(24) | |
The value of for the Earth in convenient units is
. Hence we find that the period of rotation of the plane of oscillation for a Foucault pendulum is
| |
(25) |
|
From equation 23, we can also find the angle through which the plane of oscillation rotates in one hour by finding the value of the argument of the cosine for
hour, thus
| |
(26) |
|
The latitude of Warwick University is 52° 22' 48'' (52 degrees, 22 minutes and 48 seconds). Inserting this into equations 25 and 26 gives values of 30.3 hours and
11.9°. The yellow lines on the floor display are separated by this angle.