I-RAIL - What?
How does I-RAIL work?
I-RAIL uses an ultrasonic EMAT generator, emitting Rayleigh-like waves into the rail, and multiple separate EMAT receivers, which are all scanned together along the surface of the rail in a pitch-catch configuration. The Rayleigh-like wave energy is mostly contained within about a wavelength of the surface, and by looking at the attenuation of the amplitude and frequency content of the signal, the depths of defects can be quantified; the relatively wide bandwidth of the EMATs allows for the gauging of cracks for a range of depths, as different frequencies will effectively probe different depths. All defects in the path of the wave will be interacted with, and a defect at least as the deepest one will be reported by the analysis software.
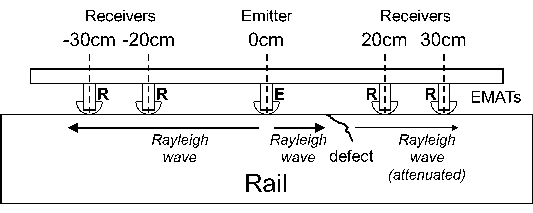
This pictures depicts an example configuration for I-RAIL. An emitting EMAT generates a Rayleigh-like ultrasound pulse in the rail, which interacts with the defect, and is subsequently detected at a receiving EMAT.
It is important to keep the frequencies used for defect quantification above the range where dispersion occurs, as this can significantly complicate the analysis. At lower frequencies, the wavelength is of the same order of magnitude as parts of the rail curvature, so the guided wave characteristics must be considered.
Problems highlighted by simulations
A simulation was created using the Huygens-Fresnel principle to quickly evaluate how Rayleigh waves will diffract round a slot of effectively infinite depth. This model splits the ultrasound source into a series of point emitters, and similarly splits the wavefront into a series of secondary wavelets to accurately model the diffraction. For the region of interest, no reflected waves need to be considered, and waves that creep round the slot are also neglected.
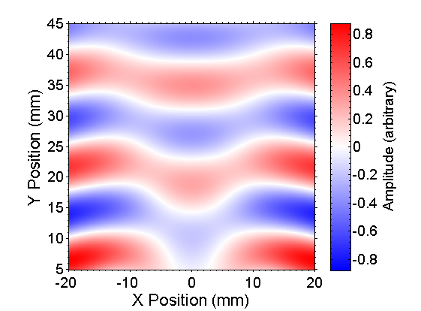
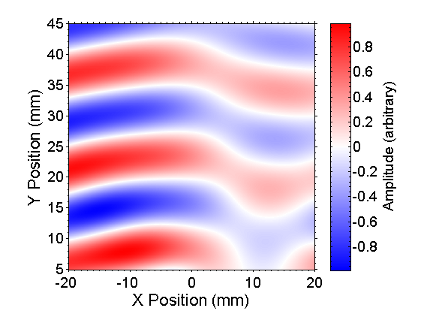
The left image is for an emitter 12mm long positioned 80mm from a 20mm slot of infinite depth centred directly in front of the emitter. The wave frequency is 200kHz and the simulated wave speed is 3000m/s. The region of interest is 5mm beyond the slot, and 20mm either side. The right image is a similar case, except the slot has been moved 10mm to the right, so that it is offset from the emitter centre. This leads to a clear change in the signal received. Other factors leading to a change in the signal received include the emitter length, the slot length, and the separation between the emitter and slot. Accounting for the length of the slot and the separation between the transducers and the slot is a difficult problem.
Separately, finite element method models highlighted how even in an ideal case, there is a limit on the maximum depth that can be accurately quantified (the algorithm would simply have to return that the defect is larger than this critical size). This is due to other waves interfering with the Rayleigh-like wave of interest. These other waves were either created by the emitter or mode-converted from the Rayleigh-like wave upon interaction with the defect.
 "ePortfolio - Phil Petcher" by Phillip A. Petcher is licensed under a Creative Commons Attribution 3.0 Unported License.
"ePortfolio - Phil Petcher" by Phillip A. Petcher is licensed under a Creative Commons Attribution 3.0 Unported License.