
I-RAIL - Hardware
I-RAIL uses some specialised hardware. Unlike conventional piezoelectric transducers (those usually used in medical sonography), the transducers below do not require surface contact to operate.
EMAT
An Electro-Magnetic Acoustic Transducer (EMAT) does not require sample contact when generating/receiving ultrasound and hence can survive scanning over hot and rough surfaces; stand-off from the surface must be less than 5mm but this is often sufficient. EMATs require a conducting (metal) sample since the primary interaction mechanism is the Lorentz force acting on induced eddy currents. Magnetoelastic effects are also present for ferromagnetic samples. The rail is electrically conducting and ferromagnetic.
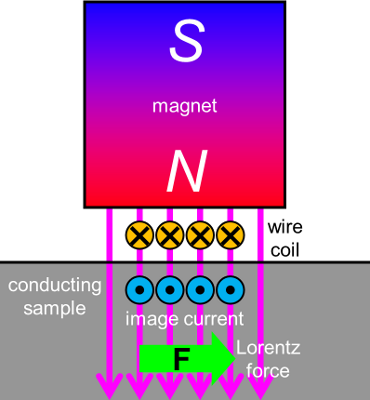
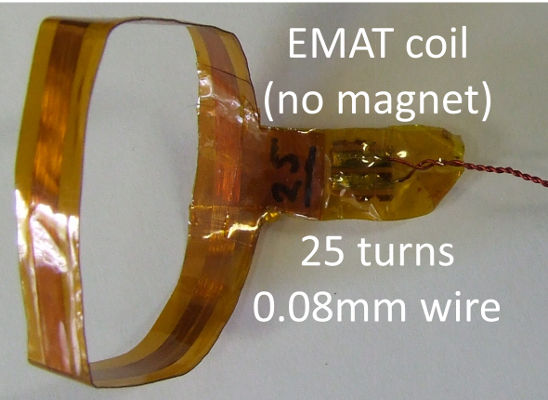
Depicted here is the principal of EMAT operation (left), and an EMAT coil (right).
On the left is EMAT generation; radio frequency (RF) alternating current (AC) is passed through wire coils and creates eddy currents at the surface of the metal. The eddy currents interact with the magnetic field from the strong static magnet (North and South poles shown) via the Lorentz interaction, and this creates force at the surface, ultimately generating ultrasonic waves. EMAT reception is largely a reciprocal process.
On the right is an actual EMAT (with the magnet missing). Usually they are placed in a non-magnetic (e.g. brass) case to make them more robust and easier to handle. The simplicity of the design is clear to see; it is simply a coil of wire encased in some Kapton tape (which works at higher temperatures than usual tape), attached to a connector (BNC in this case). Other EMATs may have different coil shapes, but the principle is the same.
It is necessary to optimise the wideband EMAT Rayleigh-like wave generation. The coil design is optimised by considering the pulse generator, coil shape and size, and the electromagnetic coupling between coil and sample. The contribution to the Lorentz force by the dynamic magnetic field (generated by the current flowing through the coil) was found to be larger than the contribution from the static magnetic field (generated by the permanent magnet) in the generation of Rayleigh waves for this application. Of course this depends on the size of the static field, the current through the coil (the excitation current used is a fairly typical broadband pulse), the design of the EMAT coil, and the lift-off (the distance from the bottom of the EMAT to the surface being tested). However, reception EMATs always require a static magnetic field.
Different EMAT coil designs generate pulses with different frequency content (also dependant on the pulse generator), amplitude and directionality; the Rayleigh-like waves generated and detected within this project usually have frequency content within the range from 100kHz to 600kHz. By looking at changes in amplitude and frequency content of the signal, the depths of defects can be quantified; the relatively wide bandwidth of the EMATs allows for the gauging of cracks for a range of depths, as different frequencies will effectively probe different depths. EMATs do not require couplant, and this reduces the degree of variation of coupling condition, and allows for inspection of the rail at high speed. EMATs are non-contact in both generation and detection, but the lift-off of the EMAT must be controlled and cannot become too large.
The EMAT case consists of a holder for the permanent magnet, and a titanium alloy deployment spring and wear face to which the coil is attached. This new EMAT design allows the light and flexible EMAT coil to lightly touch the sample surface, and hence skim over it, while the heavier and bulkier magnet is allowed to vary over a much larger range. The result is much better signal quality than could be achieved with a fixed coil and magnet, whilst minimising the chance of damage.
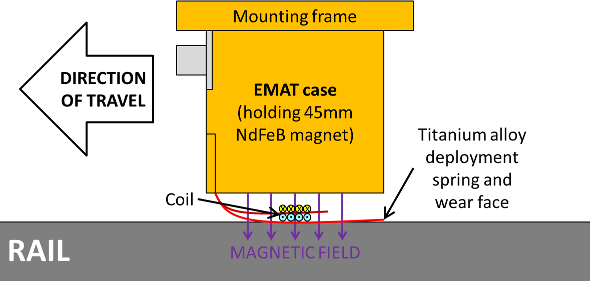
The titanium alloy deployment spring and wear face is shown in red for clarity. The coil is attached to the lower sheet of titanium alloy, the upper sheet is stainless steel and merely acts as a spring to push the lower sheet onto the rail. This prototype EMAT design can only travel in a single direction, but this can be overcome in future designs.
 "ePortfolio - Phil Petcher" by Phillip A. Petcher is licensed under a Creative Commons Attribution 3.0 Unported License.
"ePortfolio - Phil Petcher" by Phillip A. Petcher is licensed under a Creative Commons Attribution 3.0 Unported License.