WMG News - Latest news from WMG
Project workshop addresses cyber-security in connected and autonomous mobility
 Researchers from WMG, at the University of Warwick, were pleased to welcome partners and guests to a live trial and project workshop on the AirQKD project.
Researchers from WMG, at the University of Warwick, were pleased to welcome partners and guests to a live trial and project workshop on the AirQKD project.
AirQKD addresses the cyber security of Connected and Autonomous Vehicles (CAV) and specifically addresses components, manufacturing, software, and testing for last-mile Quantum Key Distribution (QKD) systems between shared parties for 5G and connected cars.
It is an Innovate UK funded collaboration between BT; Lexden Technologies; OLC; Duality, Bristol University; Fraunhofer Centre for Applied Photonics; Strathclyde University; WMG; Bay Photonics; Heriot Watt University; Angoka; ArQit; Nu Quantum; National Physical Laboratory; CSA Catapult and Edinburgh University.
The trial combines BT’s expertise in building quantum-secure networks using QKD – an essentially un-hackable, cutting-edge technique for sharing encryption ‘keys’ between locations using a stream of single photons) with other new techniques for applying quantum security to mobile devices, developed by UK start-ups Nu Quantum, Angoka and Duality.
On the University of Warwick campus, as part of the Midlands Future Mobility testbed, WMG has created a Vehicle to Infrastructure (V2I) testing facility enabling AirQKD partners’ technology in key management, key consumption, and security protocols to be used for secure communications.
The AirQKD system implements Free Space Optics (FSO) cryptographic key generation and standards-compliant key management. WMG is now managing the workstream between telecommunications (4G/5G cellular at BT’s Adastral Park site) and V2I communications on the University of Warwick campus. In combination, these technologies will be used to deliver an ultra-secure link between connected 5G towers and mobile devices, as well as to connected cars.
the workstream between telecommunications (4G/5G cellular at BT’s Adastral Park site) and V2I communications on the University of Warwick campus. In combination, these technologies will be used to deliver an ultra-secure link between connected 5G towers and mobile devices, as well as to connected cars.
Find out more about CAV research at WMG here: https://warwick.ac.uk/fac/sci/wmg/research/cav/connectivity/
Read more about AirQKD here: https://warwick.ac.uk/fac/sci/wmg/research/transformation/securecybersystems/projects
How road rage really affects your driving – and the self-driving cars of the future
 New research by WMG at the University of Warwick has identified characteristics of aggressive driving – which impact both road users and the transition to self-driving cars of the future.
New research by WMG at the University of Warwick has identified characteristics of aggressive driving – which impact both road users and the transition to self-driving cars of the future.
In the first study to systematically identify aggressive driving behaviours, scientists have measured the changes in driving that occur in an aggressive state. Aggressive drivers drive faster and with more mistakes than non-aggressive drivers – putting other road users at risk and posing a challenge to researchers working on self-driving car technology.
The research comes as a leading Detective Chief Superintendent, Andy Cox, warns of the perils of such driving – warning that the four-five deaths on UK roads daily are “predominantly caused by dangerous and reckless drivers”.
The study categorised aggressive driving behaviours and showed the key aspects of this dangerous driving style. Published in Accident Analysis and Prevention, it reported key findings:
- Aggressive drivers have a 5km/h mean faster speed than non-aggressive drivers;
- Aggressive drivers also exhibit more mistakes than control groups – such as not indicating when changing lanes;
- Aggressive driving is categorised as any driving behaviour that intentionally endangers others psychologically, physically, or both.
Lead author of the study Zhizhuo Su, PhD student, across both the Intelligent Vehicles Research Group and the Institute of Digital Healthcare at WMG, University of Warwick, said: “While it’s unethical to let aggressive drivers loose on the roads, participants were asked to recall angry memories, putting them in an aggressive state, while performing a driving simulation. These were compared to a control group, who weren’t feeling aggressive.
“This research is significant because, as the era of autonomous vehicles approaches, road traffic will be a mix of both autonomous and non-autonomous vehicles, driven by people that may engaged in aggressive driving. This is the first study to characterise aggressive driving behaviour quantitatively in a systematic way, which may help the autonomous vehicles identify potential aggressive driving in the surrounding environment."
Roger Woodman, Assistant Professor at WMG and co-author of the study, added: “Over the last few decades, road safety policies, infrastructure changes, and improved vehicle safety have significantly reduced road casualties. However, human error, which is often a result of aggressive driving, remains a leading cause of crashes. To make driving safer, our research focuses on methods for understanding the state of the driver, to identify risky driving behaviours, through the use of driver monitoring systems (DMS). This will enable the driver to be alerted when they are at an increased risk of an accident and allow the vehicle to deploy calming methods, such as altering the cabin noise level, playing relaxing music, or ultimately reducing the speed of the vehicle.”
Detective Chief Superintendent Andy Cox, NPCC lead for fatal crash investigation and OCU Commander at the Metropolitan Police, added: ‘In the UK, on average between four-five people die every single day in a road crash. This widespread devastation is predominantly caused by dangerous and reckless drivers. Having met many bereaved families who live with the lifelong heartache of prematurely losing a loved one in such a violent manner, I recognise the need to instigate substantial change across the road safety sphere; which includes driving culture, standards and legislative options.
“Those drivers who choose to commit road crimes such as aggressive driving, intimidating other sensible and safe road users – should recognise the risk they pose to themselves and others, and frankly the law should remember that a driving licence is assigned after a person demonstrates themselves to be safe and earns the right to drive. We should seek to maintain high standards and ensure the system sees the right to drive as a privilege rather than an entitlement. Currently I think the balance favours the individual rather than the law abiding collective.”
Read the full paper here.
Ends
University of Warwick press office contact:
Annie Slinn
Communications Officer | Press & Media Relations | Email: annie.slinn@warwick.ac.uk
New research led by the University of Warwick proposes a cross-domain safety assurance framework for automated transport
A new report led by academics at WMG at the University of Warwick, proposes a ground-breaking safety assurance framework that has the potential to be applied across automated transport modes.
applied across automated transport modes.
The new report is the result of Warwick’s extensive safety research which has undergone 12 months of evolution, development and validation with key stakeholders across the transport domains of land, sea and air.
Over the past year, 35 organisations in industry, academia, government and regulation from the UK and internationally have contributed to the discussions which have been captured in the report. The report encourages Government policy to tackle similar challenges all three domains face to realise the safe introduction of automated transport systems, in a joined-up manner.
The Cross Domain Safety Report highlights the economic potential of the global automated transport ecosystem, which is projected to reach over £750 billion by 2035, with a UK market share of approximately 6% representing £42 billion and creating up to 38,000 new jobs.
When it comes to safety assurance of automated transport systems, the report suggests the need to not only establish the safety level of automated transport, but also to communicate the safety level to all stakeholders (society, regulators, policymakers, developers etc).
Communicating safety level is key as one of the main obstacles to the safe introduction and consumer acceptance of automated transport are safety and trust, according to this new research. The report contains a set of key recommendations which include standardised definitions, new processes for virtual test environments, a new scalable and manageable safety assurance framework, and the key role of independent organisations.
The report highlights that whilst there are differences between the safety assurance processes of autonomous ships, aircraft or vehicles there are also large elements of crossover. This can then be leveraged by governments, developers and manufacturers by aligning safety artifacts across the different types of transport, allowing for greater safety and consumer acceptance.
Ian Stewart MP, Chair of the Commons Transport Select Committee said: “It’s important that we look ahead and horizon scan at emerging technologies… We’ve got to look ahead to make sure the regulations are in place.
“It’s really interesting that this conference looked at these issues holistically because it’s very easy in the world of transport to look at each mode as if it existed in isolation, but there will be cross cutting issues”.
Professor Siddartha Khastgir, Head of Verification and Validation at WMG, University of Warwick, commented: “Safety of automated systems needs to be pre-competitive. At WMG, we are extremely grateful to all the contributors to the report who have come on this journey with us over the past 12 months.
"Capturing the collective intellectual output of the group, we have demonstrated in the report on cross domain safety assurance across land, air and marine, that there are a lot of synergies in the approaches across the transport domains. At the same time, there are certain aspects that will be very specific to the domains that should be tackled individually.”
The full report can be read here.
WMG and Conigital receive UK government funding for ambitious self-driving research project
WMG, at the University of Warwick, and Conigital, have been awarded a share of £81 million in joint UK government and industry support to develop self- driving transport technology.
driving transport technology.
WMG is part of a consortium, led by Conigital, including the NEC Birmingham, Direct Line Group, Coventry City Council, Solihull Metropolitan Borough Council, Coventry University, dRisk, IPG Automotive and West Midlands Combined Authority.
The project entitled Multi-Area Connected Automated Mobility (MACAM) has been awarded a total of £16.6 million by the Centre for Connected and Autonomous Vehicles (CCAV), to establish a remote driving control hub, to oversee self-driving vehicles operating in Solihull and Coventry.
To make self-driving vehicle operations commercially viable, and offset current technology and driver costs, they must operate as efficiently as possible. This project therefore proposes a multi-area, multi-application self-driving operation, underpinned by Conigital’s 5G-based, central, Remote Monitoring Teleoperation (RMTO) system.
A mixed fleet of 13 self-driving vehicles will be moving passengers and light freight (such as mail and parcels for delivery) between Birmingham International Rail Station and Birmingham Business Park, and between Coventry railway station and Coventry University campus. These routes have a known, current, need for alternative transport and offer an ideal platform from which to develop commercial self-driving solutions.
New mobility technology and services will lead to safer, greener and more efficient transportation for both people and goods. MACAM will build on the foundations set by other projects including the WMG-led Midlands Future Mobility consortium.
Midlands Future Mobility is installing infrastructure on 200+ miles of West Midland’s roads to enable trials of Connected and Automated Mobility (CAM) solutions. This includes CCTV, weather stations, communications units, and highly accurate GPS coverage. The technology developed on the route will make UK roads safer and allow for more predictable goods delivery and journey times.
Transport Secretary Mark Harper said: “Self-driving vehicles including buses will positively transform people’s everyday lives – making it easier to get around, access vital services and improve regional connectivity.
“We’re supporting and investing in the safe rollout of this incredible technology to help maximise its full potential, while also creating skilled jobs and boosting growth in this important sector.”
WMG’s expertise on MACAM focuses specifically on the safety of the self-driving vehicles, as David Evans, Lead Engineer at WMG, University of Warwick explains: “Researchers and engineers at WMG will be providing trial support and undertaking related research in line with industry standards and best practice, required for the operator(s) to conduct the automated vehicle deployments safely and securely.”
Director of Intelligent Vehicles Research at WMG, University of Warwick, Professor Mehrdad Dianati, adds: “We have seen remarkable progress in Connected and Automated/Autonomous Mobility Technologies in recent years. It is paramount to pave the way for commercialising these technologies, particularly in the promising near future application areas such as the ones the MACAM consortium aims for. We are excited to be a part of this journey to transfer the knowledge we have developed through our fundamental research to help this unique consortium of UK companies, universities and local authorities to create new economic development opportunities for the region and the country.”
Don Dhaliwal, CEO of Conigital commented: “We are delighted to strengthen our links with WMG and other partners to accelerate a joint vision of Autonomous, Connected, Electric & Shared (ACES) fleets to address cities and businesses needs to Go Zero, Zero Accidents, Zero Emissions and Zero Congestion whilst creating new jobs via delivery of sustainable, accessible commercial CAM (Connected Autonomous Mobility) services.”
The methodologies and outcomes generated by the MACAM project will directly benefit teaching, research, and further collaboration with industry at WMG, developing future UK expertise and capability.
Read more about WMG’s Intelligent Vehicles research here and Conigital here
Read more about WMG’s MSc Smart, Connected and Autonomous Vehicles (SCAV) here.
Read more about the latest Centre for Connected and Autonomous Vehicles (CCAV) funded self-driving projects here.
ENDS
Notes to Editors
The government is awarding almost £42 million to seven projects through the Centre for Connected and Autonomous Vehicles (CCAV) Commercialising Connected and Automated Mobility (CAM) competition. Industry consortia will match the public grant to around £81 million and will be expected to demonstrate a sustainable commercial service by 2025.
The Multi-Area Connected Automated Mobility project is part of CCAV’s Commercialising CAM Deployments Competition (CCAMD).
The Commercialising CAM programme is funded by the Centre for Connected and Automated Vehicles, a joint unit between the Department for Transport and the Department for Business and Trade and delivered in partnership with Innovate UK and Zenzic.
The £40m CCAMD competition was launched in May 2022 to support the delivery of early commercialisable Connected and Automated Mobility Services and is part of the Government’s vision for self-driving vehicles. Connected and automated mobility 2025: realising the benefits of self-driving vehicles.
Multi-Area Connected Automated Mobility– Conigital
£8.3 million awarded by government, matched by industry to a total £15.2 million. This project looks to establish a self-driving vehicle operation around various parts of the West Midlands, underpinned by a centralised, Remote Monitoring Teleoperation (RMTO) centre. The RMTO centre will be where the project’s self-driving vehicles are monitored and (when required) controlled from, using 5G connectivity. The project aims to make self-driving vehicle operations commercially viable, and offset current technology and driver costs.
Researchers use smart roadside infrastructure and Vehicle-to-Everything technology to support connected and automated vehicles with motorway merging
As part of the AutopleX (Autonomous Cars Negotiating Complex Environments Using V2X) project consortium, researchers at WMG, University of Warwick,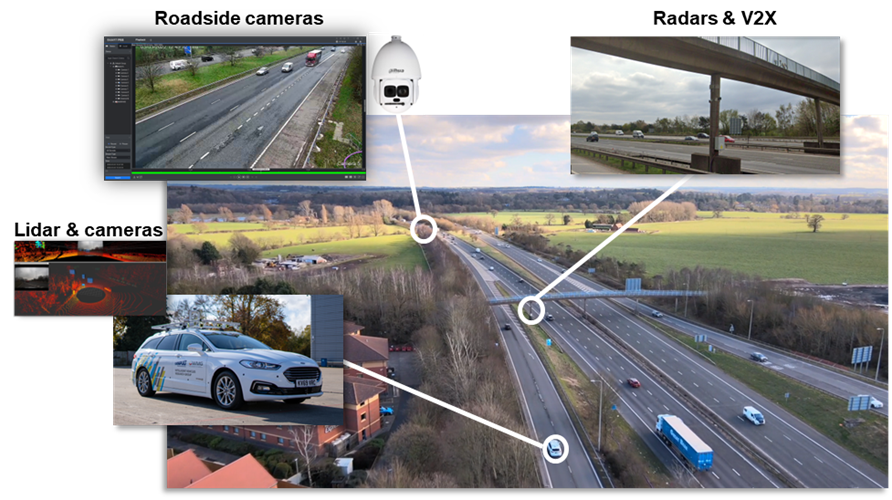 have used a connected smart roadside infrastructure and onboard vehicle systems to demonstrate how to enhance the vision and perception of future autonomous vehicles to achieve safer and more comfortable manoeuvres along high-speed junctions, such as motorway merges.
have used a connected smart roadside infrastructure and onboard vehicle systems to demonstrate how to enhance the vision and perception of future autonomous vehicles to achieve safer and more comfortable manoeuvres along high-speed junctions, such as motorway merges.
The Centre for Connected and Autonomous Vehicles (CCAV) and Innovate UK have jointly funded £2.6m for the collaborative R&D project AutopleX between March 2019 and September 2022.
AutopleX brought together WMG and leading automotive and mobility management partners Jaguar Land Rover (JLR) and Yunex Traffic, as well as public bodies such as Transport for West Midlands (TfWM) and National Highways.
Supported by the WMG Centre High Value Manufacturing Catapult, engineers and researchers at WMG have built a proof-of-concept demonstrator, where technology within a test vehicle (also known as “the EGO vehicle”) including Global Navigation Satellite Systems (GNSS), LiDAR and cameras, was fused with infrastructure-based sensing received over a Vehicle-to-Everything (V2X) communication system. This created a more comprehensive understanding of the environment in which the vehicle was travelling.
Colin Teed, AutopleX Project Manager at Jaguar Land Rover, stressed that: “Merging at high-speed junctions will be a standard action autonomous vehicles must perform and constitutes an important step in realising the vision of connected and automated mobility.”
Professor Mehrdad Dianati, Head of Intelligent Vehicles Research at WMG, added: “Onboard sensors may suffer from several limitations such as occlusions, limited range, and other forms of impairments. Especially at motorway junctions, where the speed of vehicles is usually high, undetected traffic objects by the onboard sensor suite can impose severe threats on safety. Onboard perception can, therefore, become insufficient as a standalone solution for level 4 autonomy. In this regard, the AutopleX project has developed a proof-of-concept solution that combines, in real-time, the onboard perception of a connected vehicle approaching a motorway with infrastructure-based sensing for supporting a safe merge.”
The AutopleX showcase demonstration took place via a live road traffic environment at Junction 15 of the M40 in March 2022. Yunex Traffic developed the roadside perception system, including three radars and V2X communication technology, while National Highways ensured its safe installation and effective operation.
Jet Feng, Project Engineer at WMG, explained: “The roadside perception including the locations, speed and steering angle of motorway vehicles was continuously broadcast (in the form of collective perception messages (CPMs)) and received by the vehicle’s onboard communication unit (OBU) on the Open Innovation Vehicle Platform whilst approaching the merging point of the junction. The received information was then combined with the onboard perception to improve the overall understanding of the environment and was visualised in real-time via a bird’s eye view map of the junction, allowing the passengers to observe road traffic objects along the M40, which were not otherwise visible due to occlusions.”
Furthermore, WMG and Jaguar Land Rover researchers jointly developed intelligent trajectory-planning algorithms, which utilised the combined perception to design a high-speed merging manoeuvre that is efficient, smooth, and safe.
Dr Konstantinos Koufos, Senior Research Fellow at WMG, commented: “While the Open Innovation Vehicle Platform was driven by a human driver, the calculated trajectory, including speed and steering, of a hypothetical vehicle using the combined perception was visualised in real-time on the in-vehicle monitors. This allowed the passengers to compare the trajectory of the hypothetical (or ghost) vehicle with the actual trajectory of the human-driven vehicle. Key performance indicators (KPIs) associated with road safety and passenger comfort were also calculated and compared during the merging manoeuvre. The next major step would be to engage the calculated trajectory of the ghost vehicle with the drive-by-wire system of the Open Innovation Vehicle Platform.”
The project successfully implemented and demonstrated the developed technology, collecting, annotating and processing vast datasets including over eight months of road traffic data using 10 infrastructure cameras and three RADARs. These datasets could be made available to selected organisations outside of the AutopleX consortium for user trials and feedback. In addition, it constitutes valuable R&D data that can be used in WMG’s Doctoral Training Centre in Future Mobility Technologies, as well as WMG’s MSc programme in Smart Connected and Automated Vehicles (SCAV).
Learn more about the vehicle used in the demonstration: https://warwick.ac.uk/fac/sci/wmg/research/cav/ivfac/catapult-open-innovation-vehicle/
Explore research in WMG’s Intelligent Vehicles Group: https://warwick.ac.uk/fac/sci/wmg/research/cav/
Innovate UK: https://www.ukri.org/councils/innovate-uk/
Centre for Connected and Autonomous Vehicles: https://www.gov.uk/government/organisations/centre-for-connected-and-autonomous-vehicles
WMG High Value Manufacturing Catapult:
https://hvm.catapult.org.uk/centre/wmg/
WMG PhD student heads to COP27
A PhD student, from WMG at the University of Warwick, is heading to Egypt this week for COP27.
Shravani Sharma, who is studying for a PhD in Travel Choices and Wellbeing, is heading to the climate summit as the Youth Transport Fellow for High Level Climate Champions UNFCCC, a role centred on building momentum towards an accelerated transition to zero emission vehicles.
Shravani’s work has always focused on the transport sector (which is responsible for a quarter of global greenhouse gas emissions), and on persuading policymakers, operators and the public of the benefits of cleaner and healthier modes of transport supported by evidence-based research and analysis.
She will be sharing her expertise at the “Youth on the move: Young people and transport in the 21st century” session on 10th November and at several other events.
Shravani, who is part of WMG’s Intelligent Vehicles Research Group, explained: "In a world where we are striving to adopt more sustainable forms of transport, it is paramount that our transportation systems and policies are designed to enable modal shift and promote positive travel behaviour.
“I was not even aware that transport planning was a career! I fell into it by accident after taking a module on planning infrastructure and found it not only fascinating, but so rewarding as it impacts the real world and real life. I I grew up watching TV shows about doctors in hospital environments and law firms where the protagonists save the world, which made me want to be a doctor or lawyer coming from an aspirational cultural background. I feel there should be more movies and TV shows made to inspire the upcoming generations to showcase the importance of city and transport planners, and use the power of media for positive drum rolling.
“If our towns and cities are the hearts of the nation, contributing to most of the economic activities, then transport infrastructure is our arteries. Therefore, to ensure good health of the nation we should ensure these arteries are clear of congestion, pollution, accidents etc. “
You can register for ‘Youth on the move: Young people and transport in the 21st century’ here: Youth on the move: Young people and transport in the 21st century (oecd-events.org)
Read more about WMG’s latest sustainability news here: WMG :: News (warwick.ac.uk)
How to move fast (and safe): enabling automated transport by land, sea and air
Dr Siddartha Khastgir, Head of Verification and Validation of Connected and Autonomous Vehicles (CAVs) at WMG at the University of Warwick, is working on a series of workshops to define a universal framework for autonomous vehicle safety that can apply to any mode of transport.
Dr Khastgir’s workshops, in partnership with the Department for Transport and Lloyds Register, focus on identifying the differences and similarities in safety scenarios faced by different sectors to create a cohesive safety framework.
Watch How safe is safe enough? : land, sea and air and read the Cross Domain Safety Assurance Framework for Automated Transport Systems report: to find out more.
World’s largest scenario database for Automated Vehicles is now open to public - Safety PoolTM Scenario Database
- Safety Pool™, led by WMG at the University of Warwick and Deepen AI, launches public access to the over 250,000 scenarios via a credit system
- Organisations can now earn credits for their scenario contributions to the database
- Credits can be used to access the entire set of scenarios in the database
- UK’s Vehicle Certification Agency is evaluating the use of Safety PoolTM as part of future type approvals of Automated Vehicles
Leading experts at WMG at the University of Warwick and Deepen AI, have launched credit-based access to the largest public store of scenarios for testing automated vehicles. The Safety Pool™ Scenario Database, features over 250,000 different scenarios. WMG and Deepen AI are also working with regulators internationally to help evaluate the safety of Automated Vehicles using the Safety PoolTM Scenario Database.
Safety remains one of the biggest challenges around self-driving vehicles. Driven by Safety PoolTM ’s vision of safety of self-driving vehicles being pre-competitive, the Safety PoolTM Scenario Database has created an ecosystem to enable sharing of test scenarios amongst organisations worldwide.
The database provides a large range of scenarios in different operational design domains (ODDs i.e., operating conditions) that can be leveraged by governments, industry, and academia alike to test and benchmark Automated Driving Systems (ADSs). Bolstered by scenarios generated by novel scenario generation methods: 1) knowledge-based and 2) data-based, a methodology also mentioned by the EU’s Regulatory Act on Automated Driving Systems, scenarios in Safety PoolTM are focused on uncovering failures in automated vehicles as they capture those edge-case scenarios.
Under the credit system, users are rewarded with credits for submitting scenarios to the database. Contributions are scored based on uniqueness of the scenarios and their validity, and corresponding credits are awarded to the organisation. These credits can be redeemed to gain access to more scenarios. This system encourages users to contribute to growing the database and making more scenarios available to the self-driving vehicle community.
Dr Siddartha Khastgir, Head of Verification & Validation, at WMG, University of Warwick, said: “With the public launch of the Safety Pool™ Scenario Database, we are democratizing critical data that was not easily available in the ecosystem. By aligning with international standards and working closely with regulators and developers in the UK and internationally, we are driven by the mission of making safety of automated vehicles pre-competitive.”
Database, we are democratizing critical data that was not easily available in the ecosystem. By aligning with international standards and working closely with regulators and developers in the UK and internationally, we are driven by the mission of making safety of automated vehicles pre-competitive.”
Jamie McFaden, Head of Automated Vehicle Technologies Group, Vehicle Certification Agency said: “The Vehicle Certification Agency, the UK’s Type Approval Authority, recognises the importance of ODD based testing and as a result is evaluating the use of Safety PoolTM Scenario Database as part of the Type Approval process for Automated Driving Systems.”
Coherent with our mission to align with international standards, today, each scenario has been launched in ASAM OpenScenario 1.1 and ASAM OpenDRIVE 1.6 formats. This provides further interoperability between stakeholders using ASAM OpenX standards for their simulation-based testing of automated vehicles.
The scenarios also cover a diverse set of ODD attributes and manoeuvre types such as urban environments, highways, and under varied environmental conditions where vehicles perform different manoeuvres such as cut-ins, overtaking etc. Use cases supported include Automated Lane Keeping Systems, low-speed shuttle, urban level 4, highway ADAS etc. Scenarios can also be efficiently searched using the ODD and Behaviour tags as per ASAM OpenLabel standard.
With Safety Pool™, industry, academic, industry and government experts come together to create the standards that will make the operation of automated vehicles safe everywhere. This builds an environment which enables the uptake of automated and autonomous technology in road vehicles.
Mohammad Musa, CEO, Deepen AI, said:
“By contributing and working within the Safety Pool™ framework, commercial stakeholders across AV fleet operators, OEMs, Tier 1 suppliers and all other Tier 2+ suppliers can massively accelerate verification & validation as well as share insights & edge cases that are very hard for a single stakeholder to collect by themselves.”
Eric Barbier, Head of Safety, Wayve said:
“Safety is core to the development of automated vehicles and everything we do at Wayve. As an industry, it is essential that we collaborate around a common ecosystem for safety assurance. Wayve is excited by the opportunity unlocked by the Safety Pool™ initiative and we look forward to leveraging its extensive database of curated scenarios.”
Since the launch of this pioneering project in March 2021, WMG at the University of Warwick and Deepen AI have collaborated with stakeholders around the world. To date, over 450 organisations have enrolled in the Safety PoolTM Scenario Database. The next step in WMG’s activity is working closely with regulators in the UK and internationally on enabling a safety assurance for automated vehicles through the Safety PoolTM Scenario Database.
Dr Maria J. Alonso, Lead, Automotive in the Software-Driven Era Initiative, World Economic Forum said:
“Collaboration among stakeholders is key to ensure that autonomous vehicles offer the highest possible levels of safety. The Safety PoolTM Scenario Database, with its over 250,000 scenarios and its collaborative approach, provides a platform to contribute to safer mobility on our roads.”
The development of the Safety Pool™ Scenario Database was funded by UK’s Centre for Connected & Autonomous Vehicles (CCAV), Innovate UK and Zenzic funded Midlands Future Mobility project led by WMG, University of Warwick. Furthermore, the WMG centre for High Value Manufacturing Catapult has further supported the continuous enhancements of the database with its support to the Verification & Validation team at WMG.
Notes to editors:
University of Warwick press office contact: Simmie Korotane | Media Relations | Press & Media Relations | University of Warwick | Email: Simmie.korotane@warwick.ac.uk
Useful Links:
Link to Safety PoolTM videos: https://youtu.be/edxw_VhzAYA
Link to Safety PoolTM website: https://www.safetypool.ai/
Link to Safety PoolTM Knowledge base: https://docs.safetypooldb.ai/
Researchers develop technology solutions to enhance the safety and efficiency of connected and autonomous vehicles in complex road junctions
Researchers at WMG, University of Warwick have developed technology solutions for safer and more efficient automated driving when navigating complex road junctions such as roundabouts.
![]() Working in partnership with Jaguar Land Rover, TRL and the University of Surrey, researchers from the Intelligent Vehicles directorate at WMG, University of Warwick have implemented a Proof of Concept demonstrator. This demonstrator focusses on unleashing the power of Edge and Cloud Computing, using a “connected roundabout” at the University of Warwick’s main campus.
Working in partnership with Jaguar Land Rover, TRL and the University of Surrey, researchers from the Intelligent Vehicles directorate at WMG, University of Warwick have implemented a Proof of Concept demonstrator. This demonstrator focusses on unleashing the power of Edge and Cloud Computing, using a “connected roundabout” at the University of Warwick’s main campus.
The Cloud Assisted Real-time Methods for Autonomy (CARMA) project, is part of the £11m TASCC programme funded by the Engineering and Physical Sciences Research Council (EPSRC) and Jaguar Land Rover. Supported by WMG’s Centre High Value Manufacturing Catapult, the CARMA project was established with the intention to create secure and resilient cloud-based platforms to enable safe and robust semi-autonomous functions on future cars in the short term, and with the vision of achieving fully autonomous vehicles.
Professor Mehrdad Dianati, Head of Intelligent Vehicles Research at WMG, University of Warwick said: “We expect autonomous vehicles to be much safer, much more efficient and much more comfortable than human driven vehicles. Unfortunately, with existing sensor and computing technologies, it is difficult and expensive to achieve the level of accuracy and reliability of the perception of the environment that’s expected.”
“CARMA not only demonstrates how these concepts could be implemented in practice, but also highlights what the impact of such technologies might be. This research will help manufacturers, technology developers, policy makers and road operators to make informed decisions on how they will adopt technologies in future road infrastructure, regulations, products and services.”
CARMA researchers installed eight infrastructure cameras, as off-board sensors, at the roundabout to monitor the environment and stream video to a base station called ‘Edge’. Using two-way communication, the Edge processes its own live information with information received from nearby connected vehicles. This processed data containing object, traffic, road layout and lane availability information is broadcast and received by the vehicles.
Dr Graham Lee, Principal Engineer at WMG, University of Warwick, added: “At complex road junctions, the CARMA platform can help enable on-road autonomy by providing additional real time data about the environment through the use of off-board sensors and computing. This gives vehicles the ability to navigate complex road junctions safely and efficiently.”
Dr Saber Fallah, Director of the Connected Autonomous Research Lab at the University of Surrey commented: “This technology enables new business models for the transportation system in alignment with the rise of shared mobility. In addition, autonomous vehicle technology also highlights the potential for how elderly people or disabled people can benefit from the joy of driving from point A to point B safely.”
The testing infrastructure was supported by the Midlands Future Mobility project, Innovate UK and the Centre for Connected and Autonomous Vehicles of the UK Government. The Open Innovation Platform research vehicle used within the project was developed with support from the High Value Manufacturing Catapult and used alongside the CARMA research vehicle provided by JLR.
Over ten follow-on projects have been inspired by CARMA, as technological, regulatory and business challenges are to be overcome before the concept can be deployed on a mass scale. Through the project 23 early career scientists and engineers were trained and three patents were granted along with 40 publications on the work carried out.
National Grid calls on support from the construction industry to improve wellbeing for workers
 • Research shows 91% of construction workers have felt overwhelmed and 26% have experienced suicidal thoughts*
• Research shows 91% of construction workers have felt overwhelmed and 26% have experienced suicidal thoughts*
• National Grid issues call to join its Health in Construction Consortium to improve wellbeing of workers across the industry.
• National Grid opens new Health Hub at IFA interconnector site to provide wellbeing support for staff and contractors
National Grid is calling on the construction sector to work together to develop an industry-wide approach to improve the mental health and well-being of its workers.
Suicide rates for construction workers in the UK are over three times the national average with over two employees dying by suicide every day.
This highlights that wellbeing initiatives are not reaching the most vulnerable and more needs to be done to improve support and services offered within the sector.
There are a range of factors which make construction employees especially at risk of poor mental health including regular periods of underemployment, extended time spent away from family and friends and high mobility within the workforce. This has only been exacerbated through the pandemic.
According to research by CIOB, some 91% of workers report feeling overwhelmed and 26% have experienced suicidal thoughts. *
National Grid is determined to change this, by establishing a Health in Construction Consortium and leaders have called for supporters from throughout the sector to join the project.
The call to action was made at the official launch of a new on-site Health Hub at the company’s IFA interconnector site in Kent on Thursday. (19th May).
The facility has been specially designed to improve the wellbeing of construction workers and includes a canteen providing heathy meals, recreational space, a garden and a gym as well as a quiet room for prayer and reflection.
Services such as mental health and wellbeing sessions, training and support helplines will be provided by charity Lighthouse Construction Industry Charity which provides vital support for those working within the sector.
The facility, which has been constructed by contractor J Murphy & Sons Limited, is already providing vital services to hundreds of employees working around the clock at the company’s IFA interconnector.
Together with Considerate Constructors Scheme, National Grid has established a Health in Construction Consortium and will be sharing findings from this project across the industry to demonstrate the difference this kind of support can make to workers.
Managing Director of Interconnectors for National Grid, Nicola Medalova, said: “This is an issue that all of us in the construction sector have a responsibility to address. The research shows that something has to change. That’s why we’re looking for representatives from across the sector including small to medium-sized enterprise, large businesses, contractors, and clients, who are passionate about mental health, to be part of the solution. We understand that collaboration and coordination across key stakeholders in the industry will be critical to tackling the mental health crisis in construction. So, whether you are getting started, in development, or leading the way on mental health issues within the sector, we call for your support and ask for you to join us in being an agent for change.”
Considerate Constructors Scheme Chief Executive Amanda Long said: “As an industry, the workforce is at a higher-than-average risk of poor mental health and suicide and we must take action. It is vital that we work together with the construction sector to give all employees access to the support and facilities they need to look after their mental health and wellbeing.”
Chief Executive of Lighthouse Construction Industry Charity Bill Hill said: “We are absolutely delighted to be working with National Grid on this significant issue within our industry. It is so important that we get the message of support to the 'boots on the ground' that we are there for them 24/7. If our workforce don’t know we are there for them we simply can’t help them in crisis. We are delighted to support National Grid’s Wellbeing Hub and I am convinced that this initiative will have a positive impact on workforce wellbeing and ultimately save lives.”
National Grid is working with WMG at the University of Warwick to research the experiences of construction workers using the Health Hub, and the benefits these additional services will have on employee mental wellbeing. The project is being led by Dr Carla Toro, Associate Professor in Digital Healthcare Sciences at WMG.
The research will help the business understand and make recommendations to the sector on the challenges that the construction workforce experience, and the kinds of wellbeing initiatives that could have a positive impact on quality of life and mental health.
Organisations interested in joining the Health in Construction Consortium should contact Alisha Baig by emailing alisha.baig@nationalgrid.com
*Source of Research: 2019 CIOB (The Chartered Institute of Building) Research & Survey: Understanding Mental Health in the Built Environment.